Examples are valid for:
TMflow Software version: 2.18 or above.
TM Robot Hardware version: HW3.2 or above
Other specific requirements: None
Note that older or newer software versions may have different results.
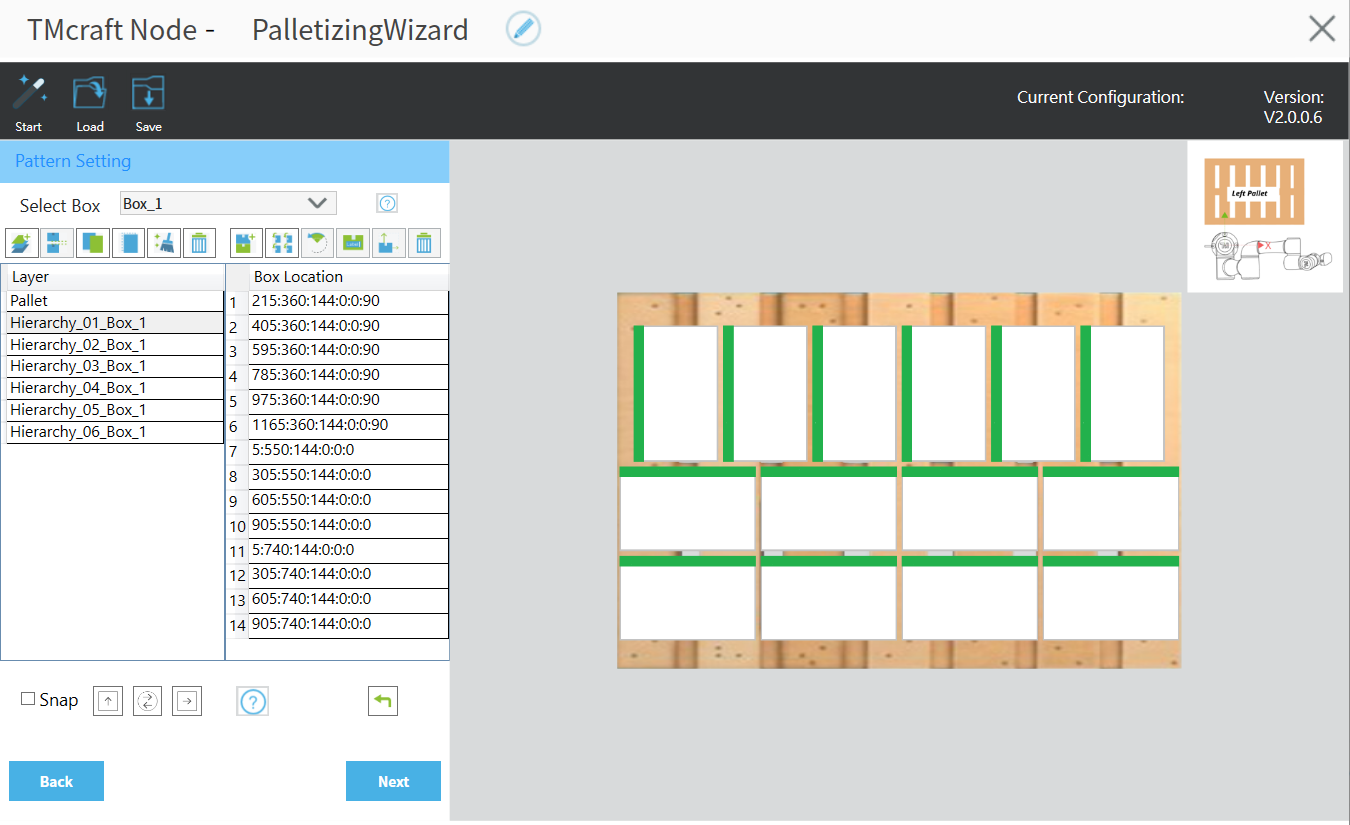
Palletizing Development Kit 2.18 #
* Main Feature
- Offers TMcraft-built Palletizing Wizard for use in TMflow.
- Applicable in single-form box palletizing.
- Optimal solution for palletizing, depalletizing, and pallet change.
- Allows users to customize boxes, pallet sizes, and box patterns, and arrange box sequences flexibly.
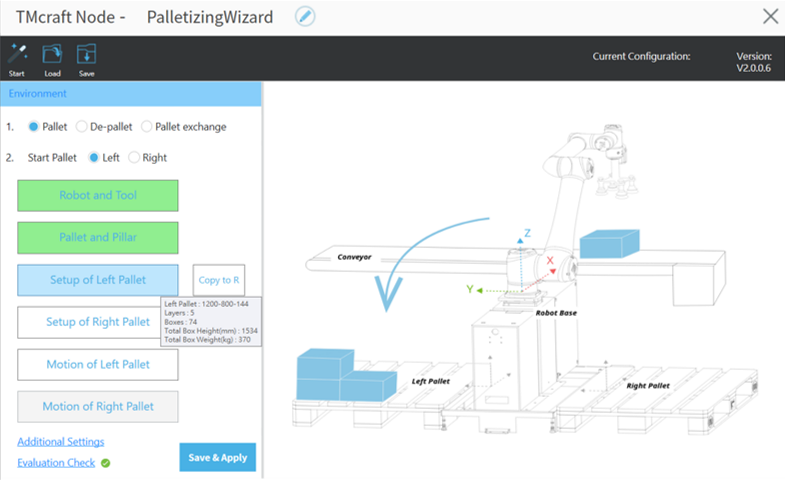
- Can be used with a 3D camera to depalletize different forms of boxes

You can try our Palletizing Development Kit by downloading it from our download center
TMflow-related Features #
* TMcraft Setup
- Allow third-party manufacturers to develop their own setup interface to help users install solutions. For example, devices settings, connection settings, defining initialization script, etc.
- Create the TMcraft Setup as a C#/WPF User Control Library, package it with TMcraft Packer, and then import it into TMflow.
- The TMcraft Setup API allows developers to use the TMcraft Setup program to perform various actions with TMflow.

* Operation Space with IO Trigger
- Users can set the robot’s operating space.
- Set Plane or Cube in the Operation Scene of the project
- Plane: the robot stops when exceeding the area surrounded by the plane.
- Cube: the robot triggers DO as entering the Cube area
- Include DO_9 to enable setting the Operation Space output signal in I/O Setup>User Define.
- Once activated, the Operation Space output signal, DO_9, cannot be controlled by users or from external sources.

* Safety Related Objects in 3D Viewer
- Add a feature to show the Cartesian Limit A/B and Basic/Advanced Safety Tool Point in the 3D Viewer.
- The 3D Viewer now includes a new Show Button that lets users choose and display space items by the hardware version.

* Conti Booting to TMflow
- When the robot malfunctions, the system can export the log upon startup as well as the project and settings associated with the faulty robot.
- If there’s an issue or a connection problem with the robot hardware or if the emergency stop button (HW 3.2) is pressed during startup, users can click the Conti. Booting button on the System Failure Reporter page to confirm access to TMflow to export the necessary data to resume jobs.

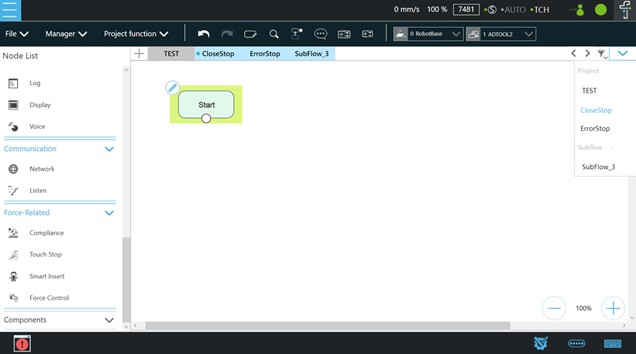
* Project Stop and Error Stop Handler Procedure
- Users can plan steps to follow when encountering a project stop or an error stop in a special subflow.
- Add new special pages: CloseStop and ErrorStop.
- These special pages cannot be renamed or deleted.
- Work with motions as the CloseStop and ErrorStop functions in the Script Project and automatically finish after 12 seconds.
- Same as Thread, support only to specific nodes: Set, If, Wait for, Gateway, Stop, Goto, New Base, Script, Log, Display, Voice, and Network.
* Optimization of Motion Node Configuration Interface
- Adjust the point details on the Circle and Pallet node.
- Reconcile the Circle & Pallet Node’s behavior of point teaching and screen.
- Introduce a feature to edit the existing point (Value Modify).

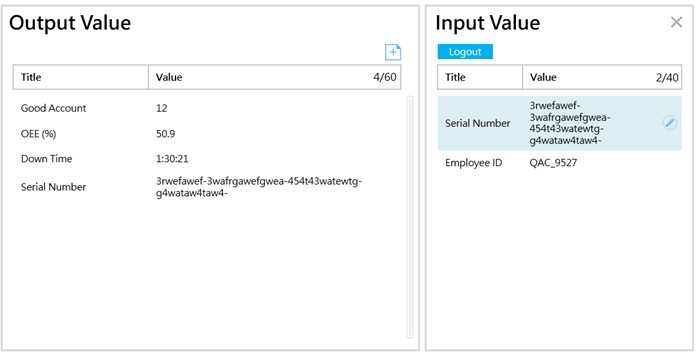
* Redesign View-Display Board-Variables Display
- Make Variable Display more flexible and user-friendly.
- Enables simultaneous parallel display of content and variables.
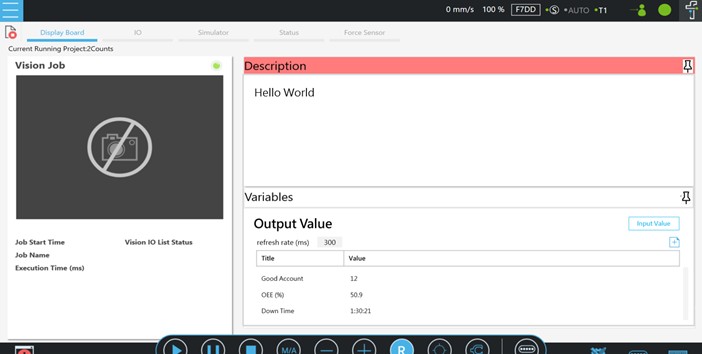
- Users can add variables onto the display (output value) temporarily.
- The Variable Display can show up to 60 output values and 40 input values.
* Auto TCP Calibration in TMflow Configuration
- Users can utilize the Auto TCP Calibration feature available in the TMflow Configuration user interface.
- Fully replace TCP calibration in TMflow 2.14 and the Auto-TCP Calibration project in TMflow 2.16, and offer the following features:
- Built-in TCP calibration is available in the Tool Settings page, and it is performed using an intuitive UI.
- TCP calibration is automatically executed after a simple setup.
- The calibration takes less time, and the user can decide how fast the robot should move during calibration. The calibration can be stopped at any time.
- The user can set up customized points and calibrate with tools of any shape.
- More parameters introduced for customization.
- Calibration parameters can be saved any time in the calibration page, and the camera’s parameters can be automatically modified.
- Collision check
- Auto-TCP calibration is more stable, accurate, and intuitive than manual TCP calibration.
* Action Improvement When Passing Through Singularity
- Provide a way to enhance the action when moving through the area surrounding the singularity, rather than stopping it abruptly.
- Define the function to process singularity in TMflow:

- The “Singularity handling” feature is available only when Line motion is selected in either Point Node or Move Node.
- When “Singularity handling” is enabled, the robot will adjust its speed as it passes through the singularity, such as when joint 5 is near 0 degrees or 180 degrees, plus or minus 5 degrees.
- The function operates only if there is no singularity at the beginning or end of a path. If this function is enabled, the function of blending to the next point will not occur.
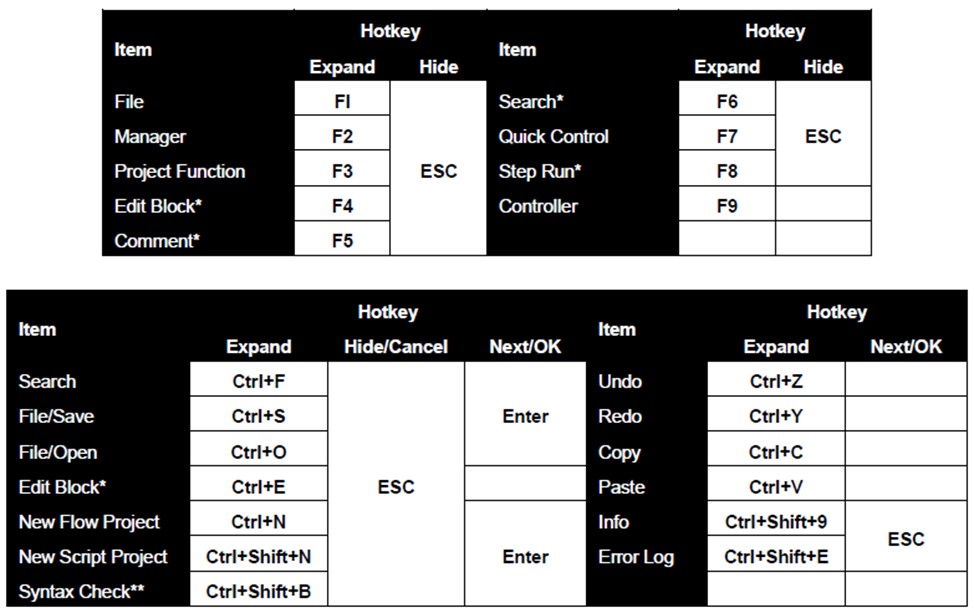
* Redefine Hot Key Functions
- Enhance the user experience by intensifying the TMflow shortcut key feature.
*Flow projects exclusive
**Script projects exclusive
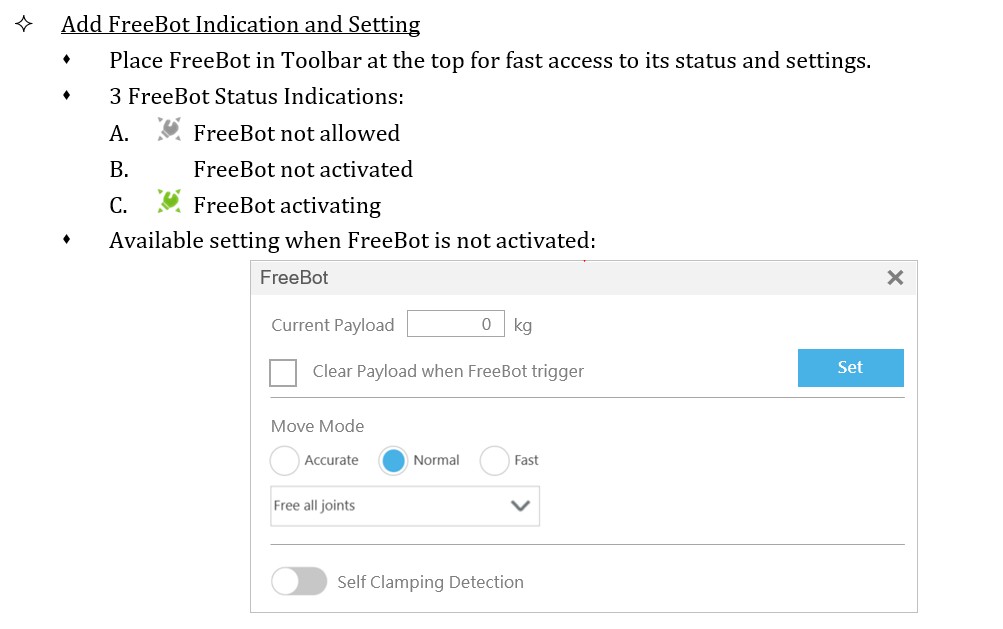
* Redefine Payload Settings in Motion Nodes
- Simplify the Payload setting in motion nodes to No Change and Change.
- After selecting Change, users can choose Payload changed with values or Payload changed from F/T sensor.
* Quick Access & Search
- Introduce a new Quick Access category to enable users to pin their frequently used Nodes for easier access, preventing them from having to search for them.
- The maximum number of pins for Quick Access is 12.
- Introduce a search field beside the Node List, allowing users to search for nodes by name.
* Tool Setting Improvement
- Add a new Tool Settings option on the project page, allowing users to access it directly without having to navigate away from the page.
- The NOTOOL in the tool list has been renamed to RobotEndFlange to provide a clearer understanding of its function.
- Improve the warnings and prompts displayed when users choose RobotEndFlange.
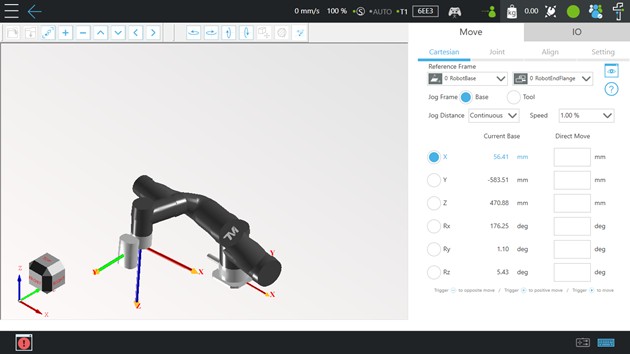
* Controller Improvement
- The controller function is now conveniently located in the toolbar at the bottom, allowing users to access it from any page without extra steps to navigate to a specific one.

- Adjust the layout of the controller page. Add an Align function that allows the robot to automatically align with the selected base.
* Script Node Improvement
- Expand the script node editing space with size fixed and non-adjustable.
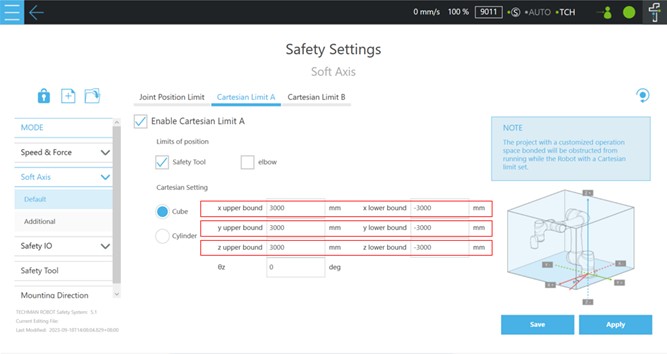
* Increase the Degrees of Freedom within Cartesian Limit
- Modify the upper bound and the lower bound of Cartesian Limit A and Cartesian Limit B input values to ±3000.
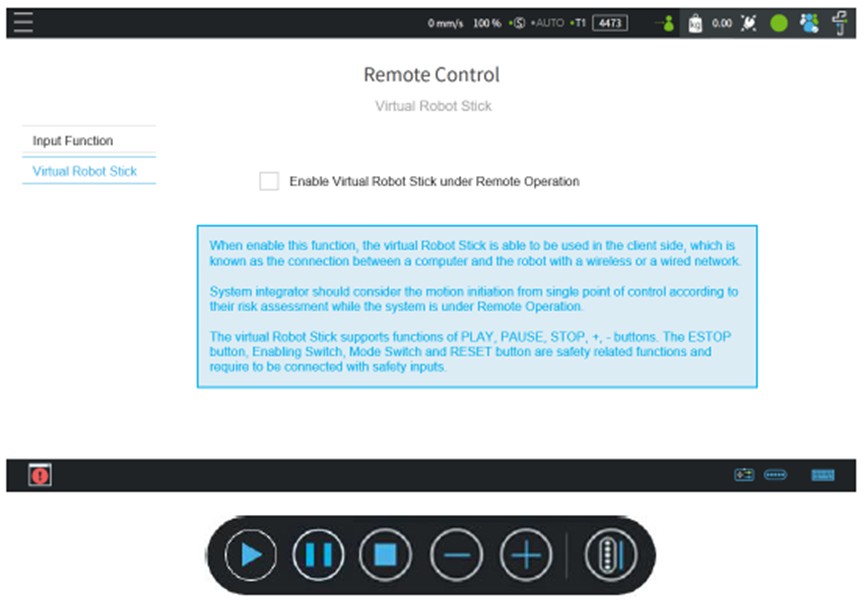
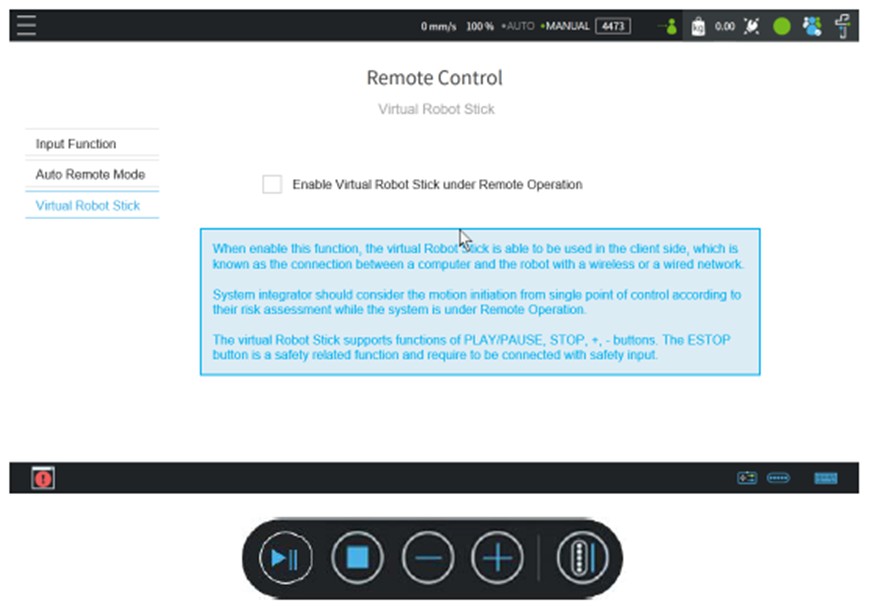
* Virtual Robot Stick
- Control robots in areas where no physical wired connection is available.
- HW 5.0
- HW 3.2
TMvision-related Features #
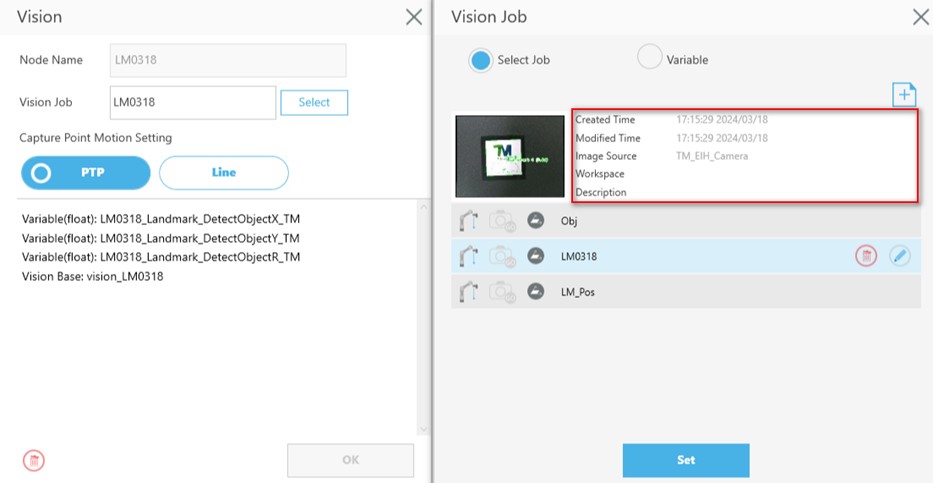
* Vision Job Description
- In Vision Node, users can learn the key functions of each Vision Job without having to open it.
- The vision task list is topped with vision job description.
- The task list shows icons indicating its application category, snap-n-go status, and capture point type.
- The description details cover the image result, date and time of creation and editing, image source, working space, and the information.
* Vision Positioning/Inspection Node
- Users can learn intuitively that the vision functions come with two applications: positioning and inspection.
- Add the AI Vision group in TMflow projects with two nodes: positioning and inspection.
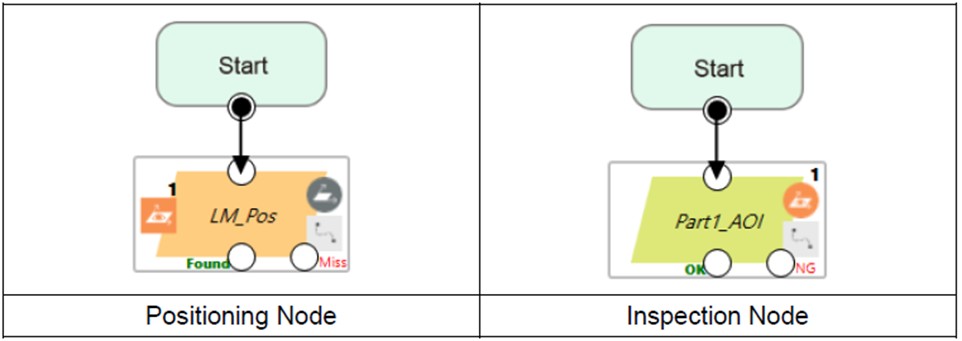
A. From the Positioning node, users can create or open any vision jobs that are under the positioning category: Object-based Positioning, Landmark Positioning, Object Servoing, Landmark Servoing, Object-based calibration, and Smart-Pick.
B. From the Inspection node, users can create or open any vision jobs that are under the inspection category: AOI and Vision I/O.
- Vision Manager in script projects divides into Vision Positioning and Vision Inspection.
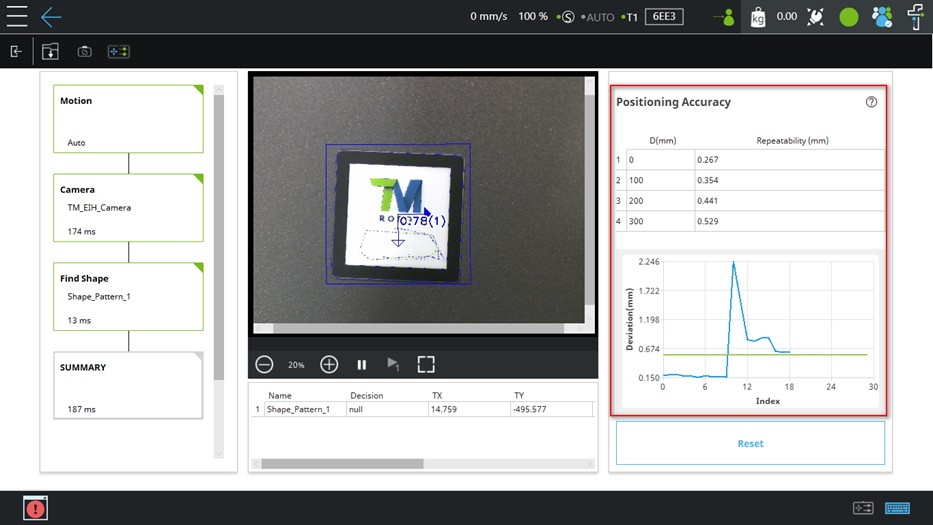
* Vision Positioning Statistics
- To display positioning statistics in a positioning job.
- When a positioning job is finished, users can check Repeatability and Deviation results in SUMMARY.
* Vision Parameter Categorization
- Vision parameters are categorized as follows: Parameter Settings, Advanced Parameter Settings, Judgement Conditions (support Inspection jobs), and Display Settings.

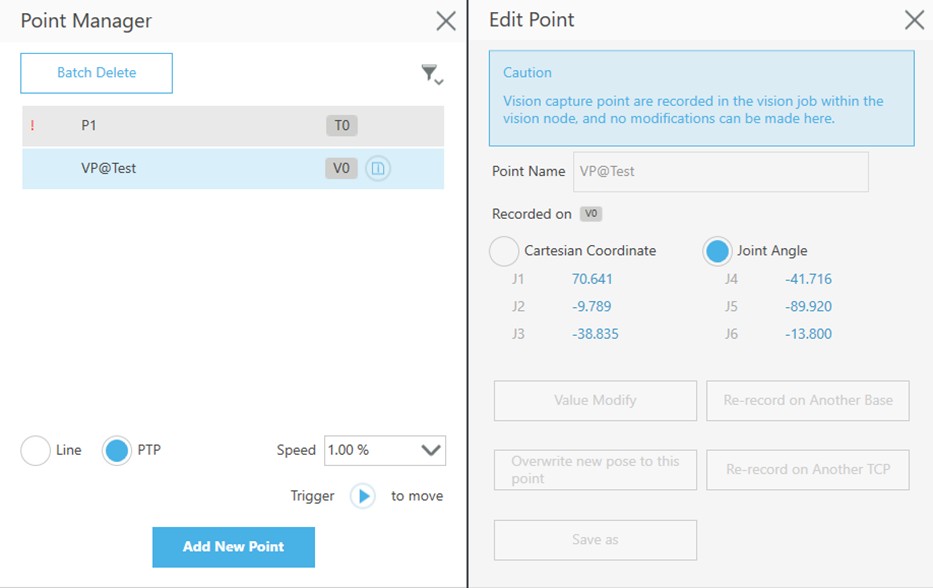
* Add Vision Point into Point Manager
- Users can view vision point (VP) information in the Point Manager.
- VPs are added to the Point Manager. Their names take the format of “VP@Vision Job.”
TM AI+ related Features #
* Instance Segmentation
- Users can utilize the instance segmentation model for precise pixel-level object detection and localization.
- Users can annotate labels while editing the dataset in Instance Segmentation, and a label can come with multiple instances.

- There are 3 evaluation samples, Actual, Predicted, and Heatmap, in Instance Segmentation. The results display with Label Mask as the same labels for the same color, Instance Mask as all instances for different colors, and Bounding Box is the minimum enclosing rectangular area of the Mask.

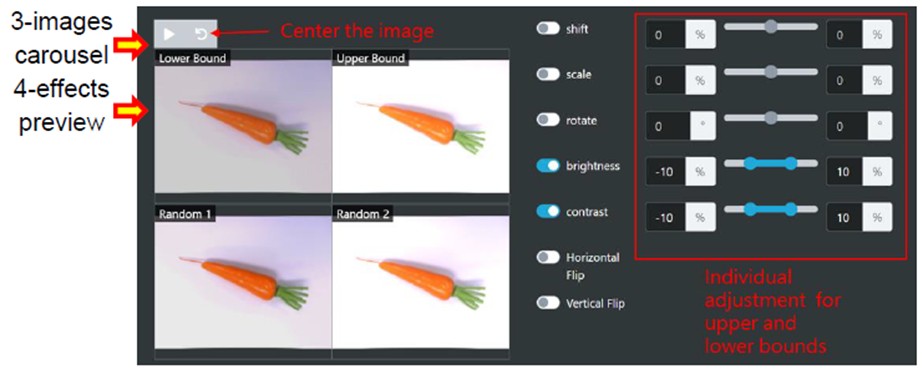
* Augmentation Example Display with Dataset Images
- Users can see the augmentation effects of the dataset image.
- Demonstrate the augmentation effects of the dataset image.
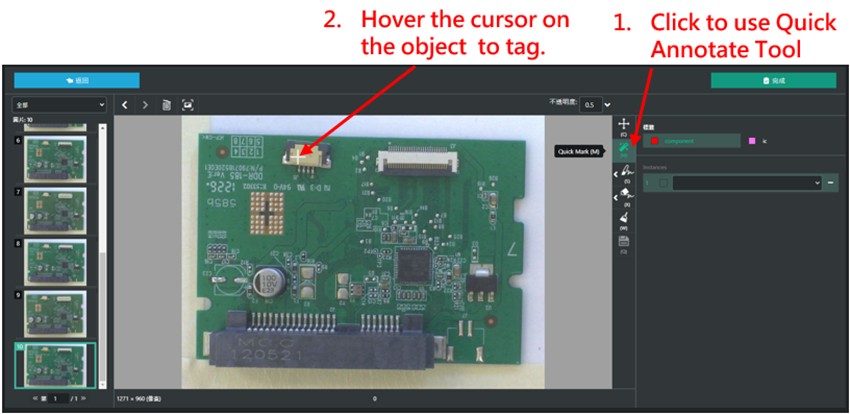
* Quick Annotate Tool in Segmentation Annotation
- Users can speed up the process of labeling objects.
- Add Quick Annotate in Segmentation Annotation.
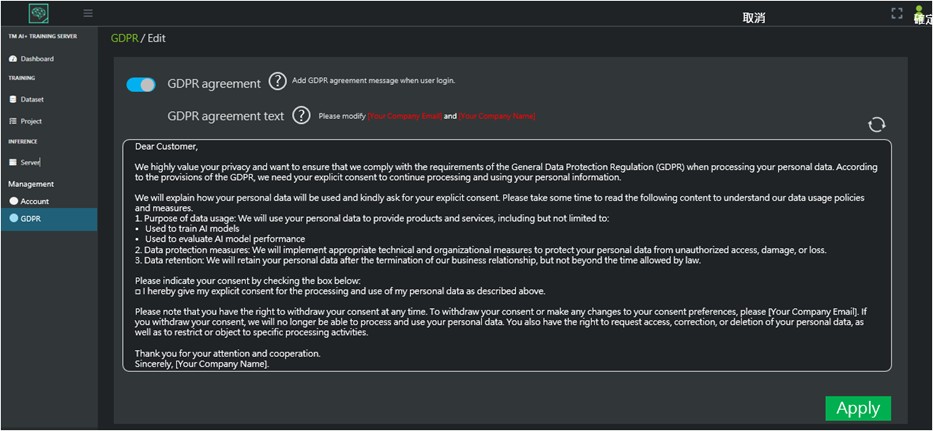
* General Data Protection Regulation
- Users can follow the EU’s data protection rules.
- The GDPR page includes ready-to-use clause templates that the administrator can edit or reset to the default template.
- The administrator can turn the GDPR feature on or off, with it being off by default. Once adjusted, clicking Apply is required for the changes to take effect.
* Support Having Training Server and Image Manager Installed on the Same Device
- Users can install both Training Server and Image Manager on a single host.
- Regardless of the installation order, users can install both Training Server and Image Manager on the same host.
- Installing the Training Server and the Image Manager on the same host ensures correct functionality only when each operates separately, not simultaneously. The software versions don’t have to match exactly, but they must be at least version 2.18.
- The hardware, OS, and environment configuration must all match the software requirements.
More Features #
* Script Improvement
- TM Script Adds:
- New base operation functions, ConvShift() and BaseShit(),to convert the new base value with the teach value and the shift value.
- Class and functions that align with TMflow: MDecison, Collision Check, Listen Node.
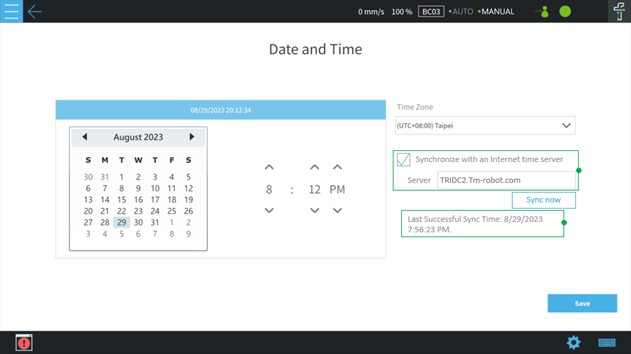
* Add NTP Server Option
- Align the clocks of all robots to keep their production timelines or error logs consistent.
- When checked, updates will automatically synchronize at startup, with update messages appearing every hour. These messages will remain until the next update or shutdown.
* Support Photoneo Alpha 3D Scanner
- The Photoneo Alpha 3D Scanner can be used in palletizing and de-palletizing.
- The Photoneo Alpha 3D scanner can be used to perform 3D vision positioning.
- The scanner comes in different sizes (L and XL). It has a broad scanning range and can be used in palletizing and de-palletizing.

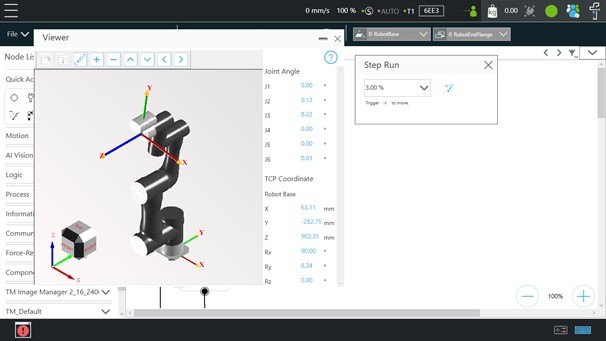
* Viewer Button in Step Run
- Users can test and see how a robot moves in the TMflow Simulator as though they are controlling it in reality.
- Click the button to launch the viewer window.
* Add SRI_M4313N3C to the Force Sensor List
- Include SRI_M4313N3C in the force sensor list. Users can select SRI_M4313N3C as the force sensor.


