Table of Contents
| Supported Main Module | ADLink
EPS-6000 |
BECKHOFF
EK1100 |
DELTA
R1-EC5500D0 |
Weidmuller
UR20-FBC-EC |
OMRON
NX-ECC201 ECC202 ECC203 |
| # Digital Input | 128 | 128 | 128 | 128 | 128 |
| # Digital Output | 128 | 128 | 128 | 128 | 128 |
| # Analog Input | 2 | 2 | 0 | 0 | 0 |
| # Analog Output | 2 | 2 | 0 | 0 | 0 |
| Supported Sub Module | DIO / AIO Module | DIO Module | DIO Module | WPA-133491 WPA-131539 WPA-131544 WPA-131520 WPA-131525 |
NX-ID4342 NX-ID4442 NX-ID5342 NX-ID5442 NX-ID5142-5 NX-ID6142-5 NX-OD4121 NX-OD4256 NX-OD5121 NX-OD5256 NX-OD6121 NX-OD6256 |
Supported TM Controller Hardware Version : 1.x/2.x/3.x
Supported TM Controller Software(TMflow) Version : 1.76 and later
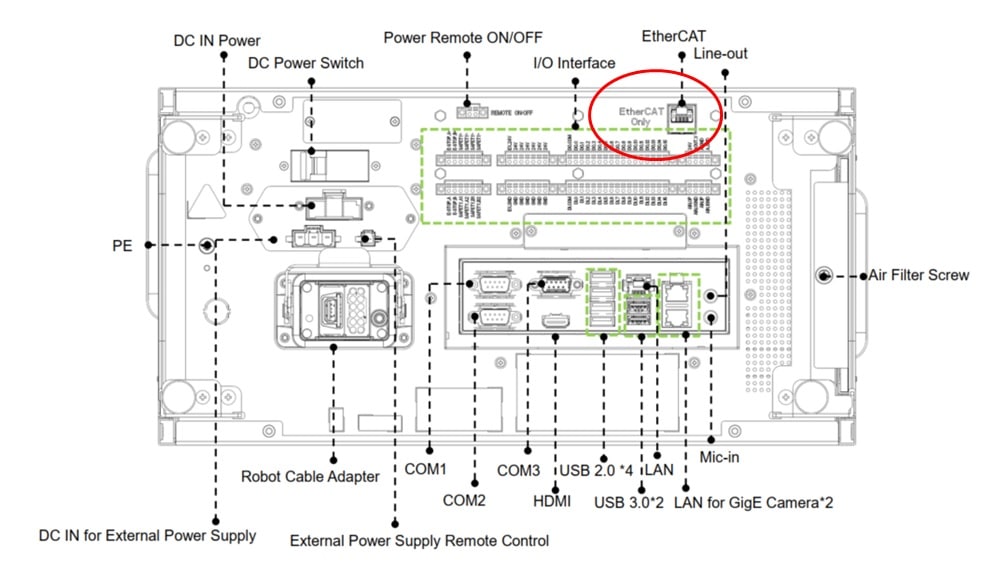
How to Connect a EtherCAT remote I/O? #
- Shutdown TM Robot
- Remove any power
- Connect the power(+24V normally) for the remote I/O device
- Connect the remote I/O device to the EtherCAT port on TM controller with an EtherCAT cable
- Power up TM Robot, new I/O should be shown on I/O page in TMflow automatically
- The remote I/O is ready to use
How to Check if an EtherCAT Slave I/O Device is Supported or Not? #
Due to the complexity of EtherCAT I/O protocol, some devices might be compatible with TM robot and others might not.
Please send us an email and prepare the EtherCAT Slave Information file(*.ESI) and EtherCAT Network Information file(*.ENI) to check:


