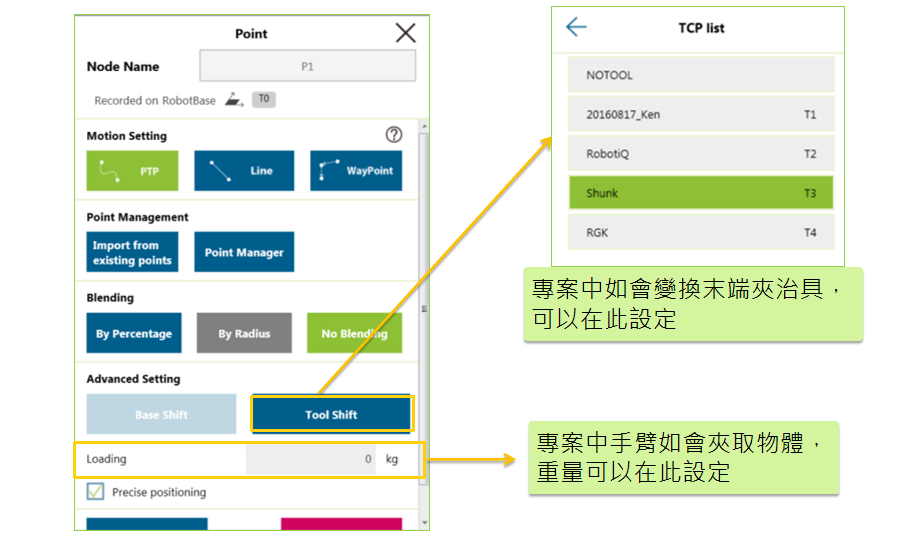
| Step 1: Check whether you have selected the correct TCP list for the node being executed for a project.
Click Tool Shift from Point to set up the TCP list. |
 |
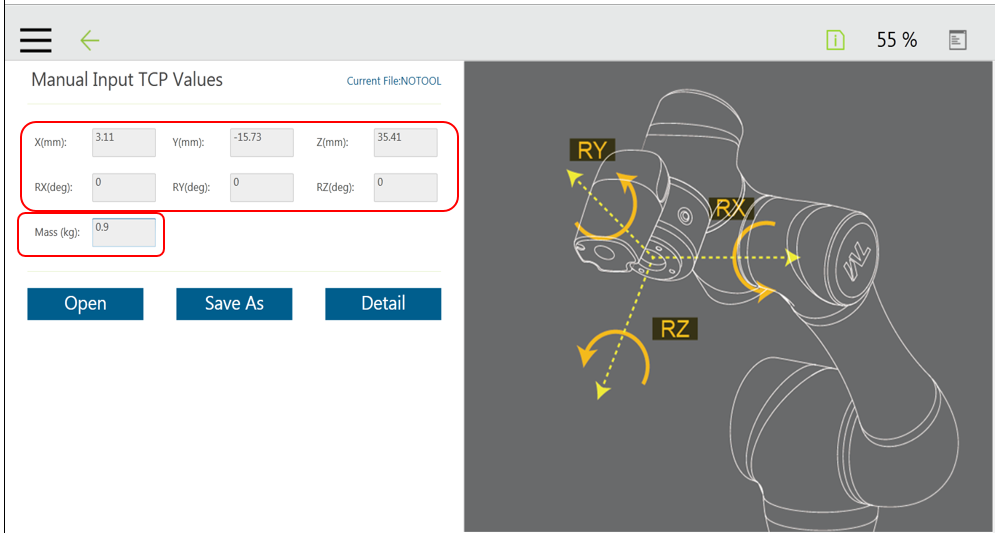
| Step 2: Check whether the TCP is set up properly.
Check whether the coordinates and mass of the TCP are set up properly. How to check the tool base: Switch the robot base to the tool base and rotate the robot to see if any yaw occurs. |
 |
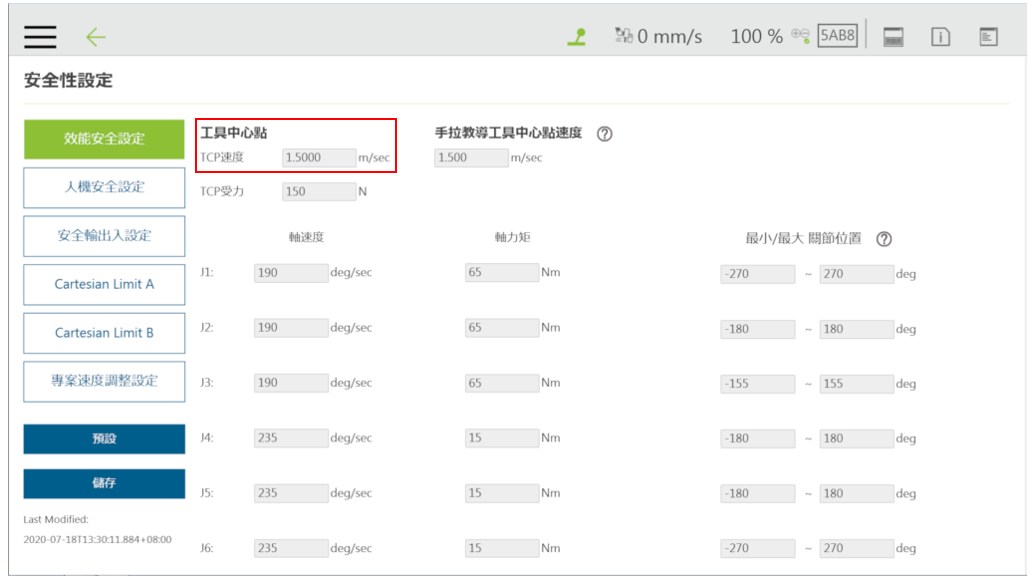
| Step 3: Limits of TCP force, joint torque, and joint speed.
Check whether TCP speed is normal. |
 |
| Step 4: Contact your TM Robot FAE. |
Popular Search tm5modbusvisionprofinettm-
HOW TO DIAGNOSE AND TROUBLESHOOT THE “TCP SPEED EXCEEDS LIMIT” ERROR WHILE USING THE ROBOT



Powered by BetterDocs