- Control box can not start up
- Robot connection error
- Robot voltage error
- Camera connection error
- Controller Digital IO error
- Joints error
- Point offset
- Stick error
- External devices connection error
- SSD Error
- Vision error
- Singularity of Robot
- Insufficient speed of CPU fan
- New robot unboxing and first time to start up
- HMI update failure
- Project open failure
- Robot auto reboot
- Ether CAT expansion I/O module has no reaction
- Error value of “Fix point ”is too large
Control box can not start up #
| Case description | ||
| This section describes possible faults during start up of the IPC and suggested actions for each type of fault. | ||
| Result | ||
| After pressing the power button on the Stick, there is no boot response in the IPC, and the LCM has no screen. | ||
| Possible reason | Common error code | |
| The following are possible reasons that the IPC cannot be turned on.:
1)AC has no power or power cord damage 2)The power cable is loose 3)AC power input to the relay board is loose 4)Components on the Relay Board burned out 5)Stick or IPC damage 6)power supply 24V is damage |
NA | |
| Symptom |  |
|


Robot connection error #
| Case description | ||
| This section describes possible faults and suggested actions for each type of fault when the arm cannot be connected to the IPC. | ||
| Result | ||
| The HMI cannot be accessed, there is no End module light, and the system log shows Error Code 0x3C, 3B, 4B. | ||
| Possible reason | Common error code | |
| The following are possible reasons that the IPC connection error:
1)The robot’s cable is loose 2)Robot voltage is too low 3)The cable between relay board and the Power supply 48V is loose. 4)Related wire of Power control board is loose. 5)Joints power cable and E-bus wire are loose. |
0x0000003B
0x0000003C 0x0000003E 0x0000004B 0x0000004C 0x0000004E 0x0000FFE4 |
|
| Symptom |  |
|

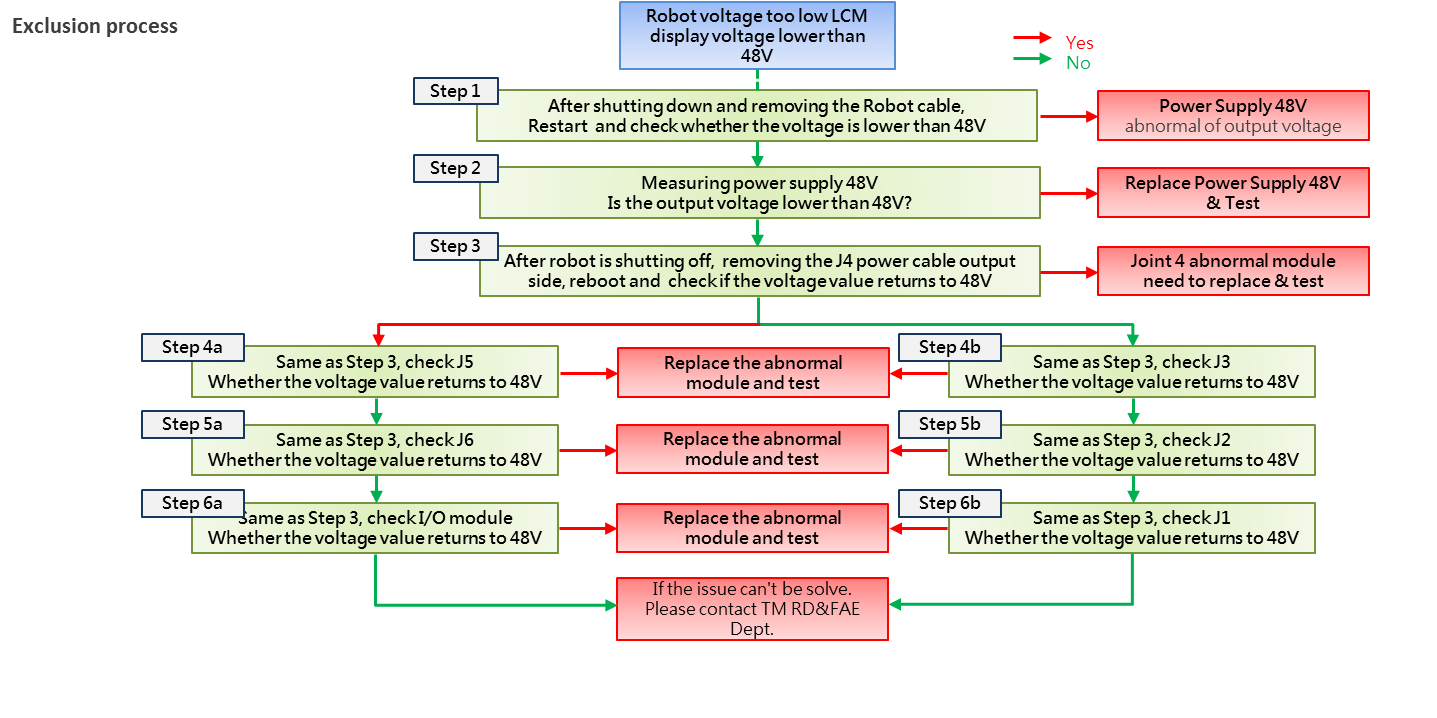
Robot voltage error #
| Case description | ||
| This section describes possible faults and suggested actions for each fault when Robot voltage is too low. | ||
| Result | ||
| The HMI cannot be accessed, there is no end module light, LCM 48V reduced to under 40V and the system log shows Error Code 3c, 3E. | ||
| Possible reason | Common error code | |
| The following are possible symptoms of abnormal voltage:
1)Power supply 48V abnormal of output voltage 2)Joint 1 module abnormal 3)Joint 2 module abnormal 4)Joint 3 module abnormal 5)Joint 4 module abnormal 6)Joint 5 module abnormal 7)Joint 6 module abnormal 8)IO module abnormal |
0x00000035
0x0000003C 0x0000003E 0x00000053 |
|
| Symptom |  |
|
Camera connection error #
| Case description | ||
| This section describes possible faults and recommended actions for each type of fault when the camera is disconnected. | ||
| Result | ||
| The EIH camera item disappears when the system displays a camera connection abnormality or vision settings in the camera list during standby and operation of the vision task. | ||
| Possible reason | Common error code | |
| The following are possible symptoms of camera connection abnormalities:
1)System delay 2)Camera Error 3)USB Port is abnormal in IPC 4)Power board is abnormal 5)camera cable is abnormal 6)USB extender device board is abnormal 7)Robot Cable is abnormal 8)Connecting is loosing |
0x00020000
0x00020007 |
|
| Symptom |  |
|


Controller Digital IO error #
| Case description | ||
| This section describes possible faults and suggested actions for each fault when Controller Digital IO error. | ||
| Result | ||
| There is delay or no respond on the signal output in the IPC. | ||
| Possible reason | Common error code | |
| The following are possible symptoms of IPC that cannot be start up::
1)DO’s external device, whose current value is higher than 100mA, causing the IO circuit to burn out 2)The leakage current between the circuits of the IPC IO connected to the external device The maximum drive current per channel is 300mA for TM5A/TMAA and 100mA for TM5. If the load exceeds maximum drive current, a relay should be used to drive it. |
NA | |

Joints error #

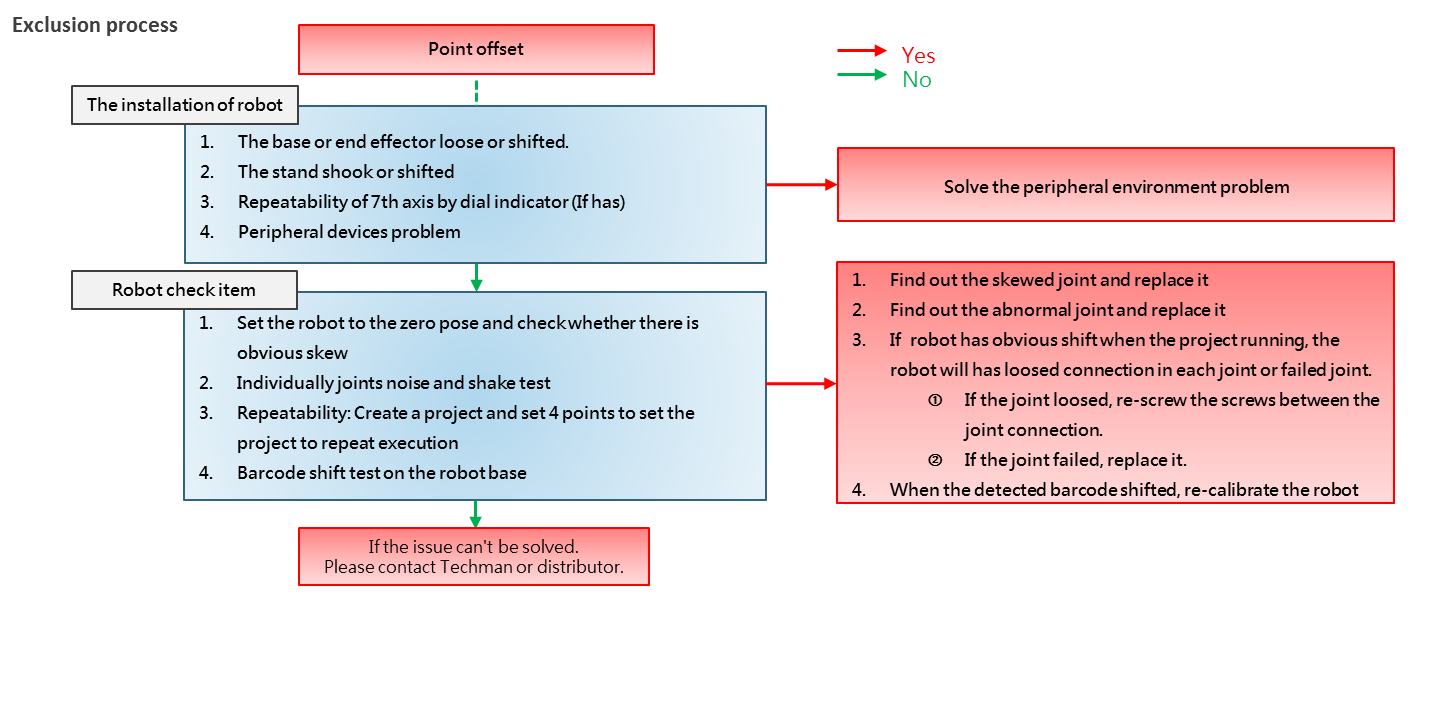
Point offset #
| Case description | ||
| This section describes possible faults and suggested actions for each fault when the point offset. | ||
| Result | ||
| Project’s points offset due to the collision | ||
| Possible reason | ||
| The following are possible symptoms of point offset:
1)The peripheral environment problem. 2)The joint had loosed or failed. 3)The robot had collision. |
||
| Attention | Techman suggests the customer to verify the joint function every time when collision happened, and estimate to replace the joint while TM judge the joint is damaged.
After trouble shooting, if the collision was caused by project running, please check the project flow as below: a)IO timing b)Flow logic c)Communication timing d)point blending setting |
|
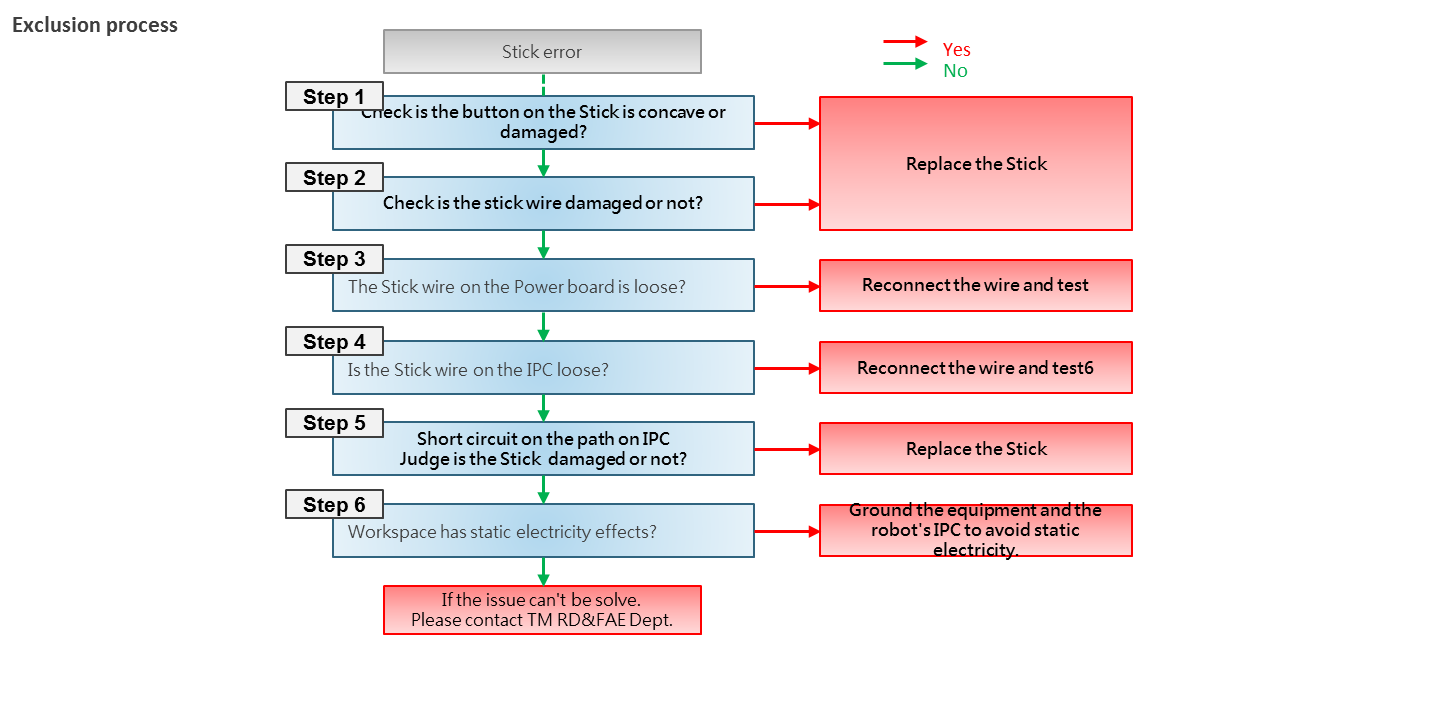
Stick error #
| Case description | ||
| This section describes possible faults and recommended actions for each fault when the Stick is abnormal. | ||
| Result | ||
| 1.When the project is executed, it will be changed by paused or automatically with random.
2.When the project is executed, it will automatically enter the Emergency mode. 3.Buttons have no response 4.Robot can not start up |
||
| Possible reason | Common error code | |
| The following are possible symptoms of the Stick exception:
1)The button on the Stick is concave or damaged 2)Stick wire Damaged 3)The Stick wire on the Power board is loose 4)Is the Stick wire on the IPC loose 5)Workspace has static electricity effects |
NA | |
| Symptom | 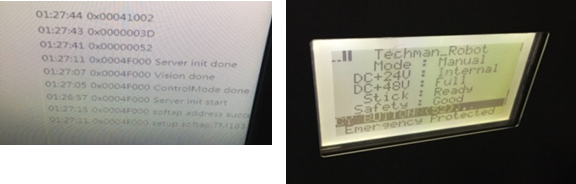 |
|
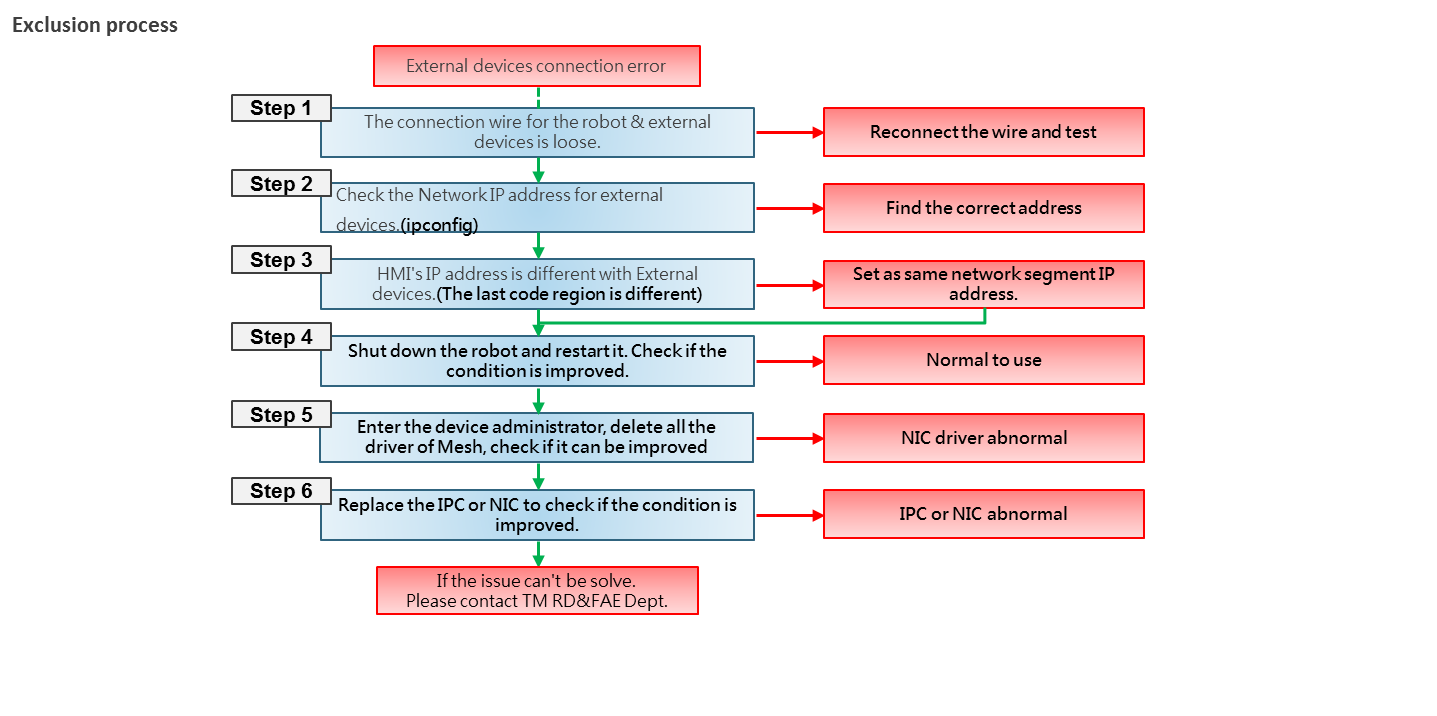
External devices connection error #
| Case description | ||
| This section describes possible faults and recommended actions for each fault when the external device is connected abnormally. | ||
| Result | ||
| The Robot disconnected to the external camera, PC, communication connection device , the port position light is not bright or only the monochrome light (orange or green). note: Need to use the port beside USB port of robot. | ||
| Possible reason | Common error code | |
| The following are possible symptoms about electric control box which cannot be connect to another equipment:
1)The connection wire for the robot & external devices is loose. 2)Incorrect Network IP address for external devices. 3)HMI’s IP address is different with External devices. 4)NIC driver abnormal 5)IPC or NIC abnormal |
NA | |
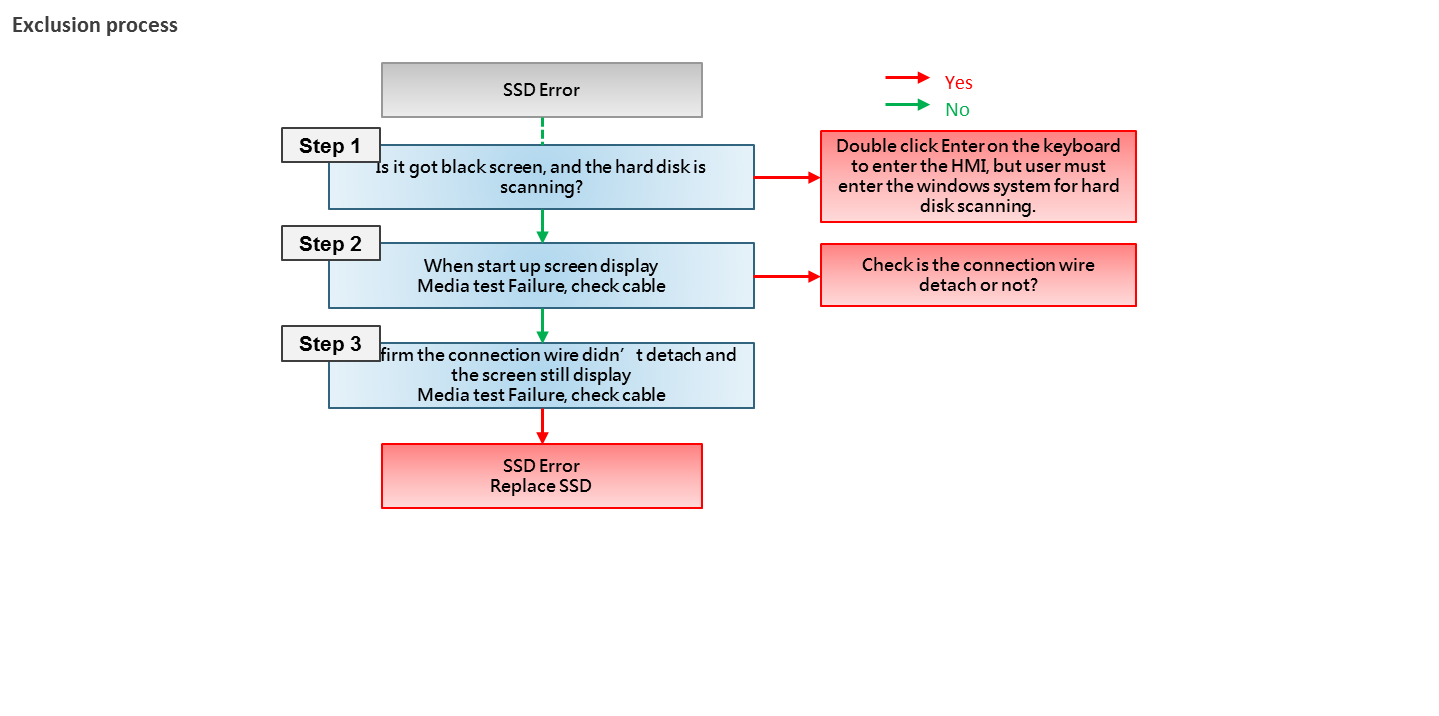
SSD Error #
| Case description | ||
| This section describes possible faults and suggested actions for each fault when the SSD is abnormal. | ||
| Result | ||
| Unable to enter the HMI system, the screen displays a black screen or Media test Failure, check cable. | ||
| Possible reason | Common error code | |
| The following are possible symptoms of SSD that cannot be use:
1)The Connection wire of SSD is loose 2)Hard disk scan settings 3)SSD Damaged |
NA | |
| Symptom | 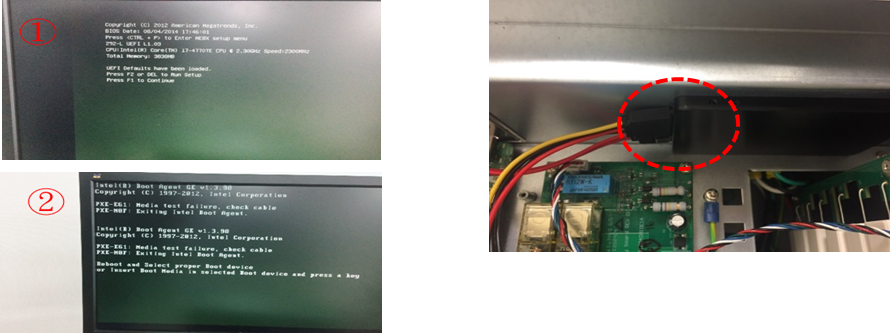 |
|
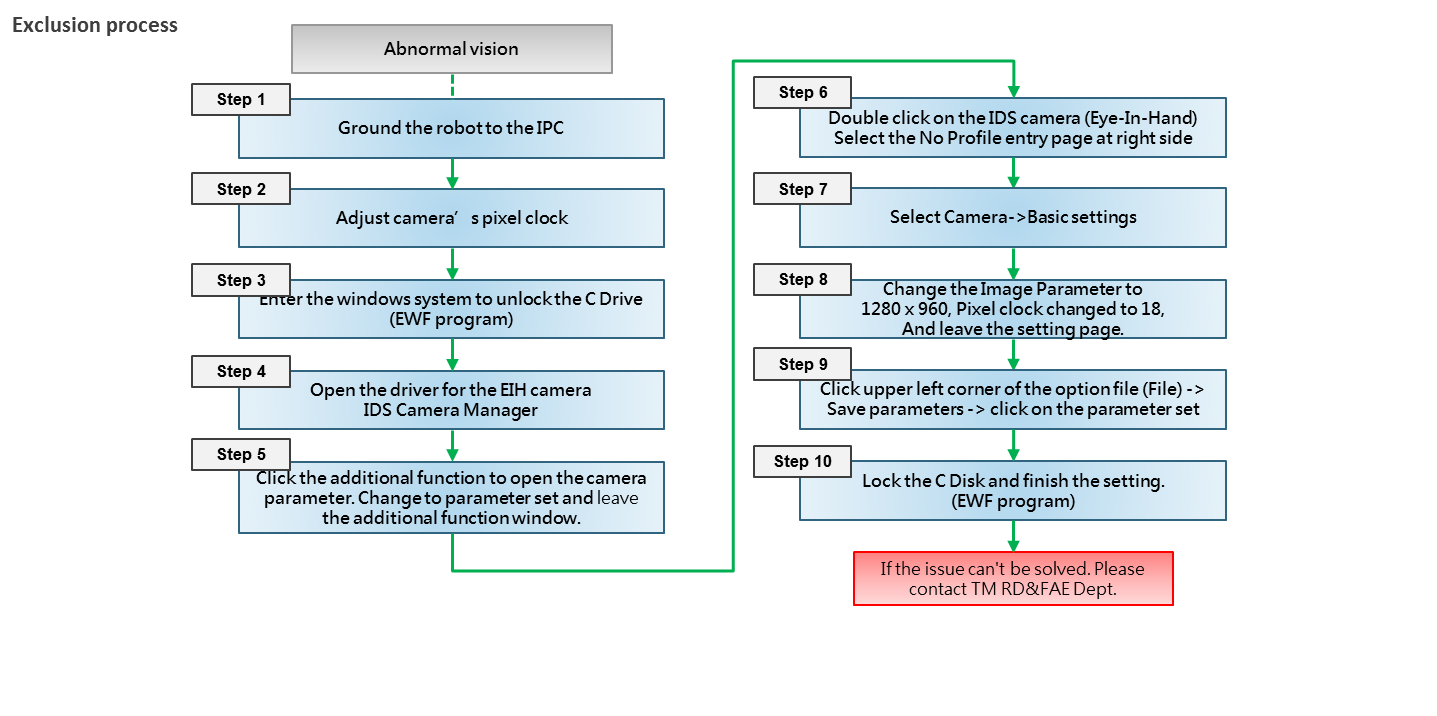
Vision error #
| Case description | ||
| This section describes possible faults and suggested actions for each type of fault when the vision is abnormal. | ||
| Result | ||
| When using vision task a range size about ¼ of the view doesn’t update vision | ||
| Possible reason | Common error code | |
| The following are possible symptoms of Vision that could be error:
1)Camera USB wiring effects 2)Camera image parameters 3)Pixel clock to high |
NA | |
| Symptom | 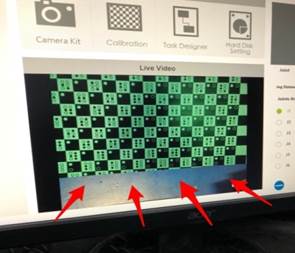 |
|
Singularity of Robot #
| Case description | This section describes the robot singular point space and how to prevent it. | |
| Result | When the robot pass the singular, the system will report error code 0X09, 0x14 or position information is disordered, causing the robot move abnormally. | |
| Possible reason
|
1.Inner singularity
In the inner singularity, the wrist root point is close to cylindrical as shown in below. The definition of cylindrical radius , is distance between center of J1 and J6. Once robot arm close the inner singularity, robot arm will stop and sent out a warning. 2.Extended singularity In the outer singularity, the wrist root point is located at the limit of its work envelope. Namely, J3 is almost in zero degree. Robot arm stop and send out a warning when end-effector beyond working space. Processing steps: While robot arm send out a warning because of inner singularity, user can press the FREE bottom to get rid of warning. Please reconsider the position of the points or change the trajectory between the points. Please avoid the robot trajectory between the points cross the inner singularity 3.Wrist axis singularity In the wrist singularity position, the J4 and J6 line up each other. In this case, these joints will try and spin 180 degrees instantaneously. There is an infinite number of possible for J4 and J6 with identical axis angle. Once situation mentioned occur, robot arm will stop and send out a warning Processing steps: While robot arm send out a warning because of wrist axis singularity, user can press the FREE button to get rid of warning. Try to move the robot along z-axis in tool base when J4 and J6 with identical axis angle will cause wrist axis singularity. The picture below shows an example to prevent wrist axis singularity. |
Common error code
0x00000009 0x00000014 0x0000FF05 |

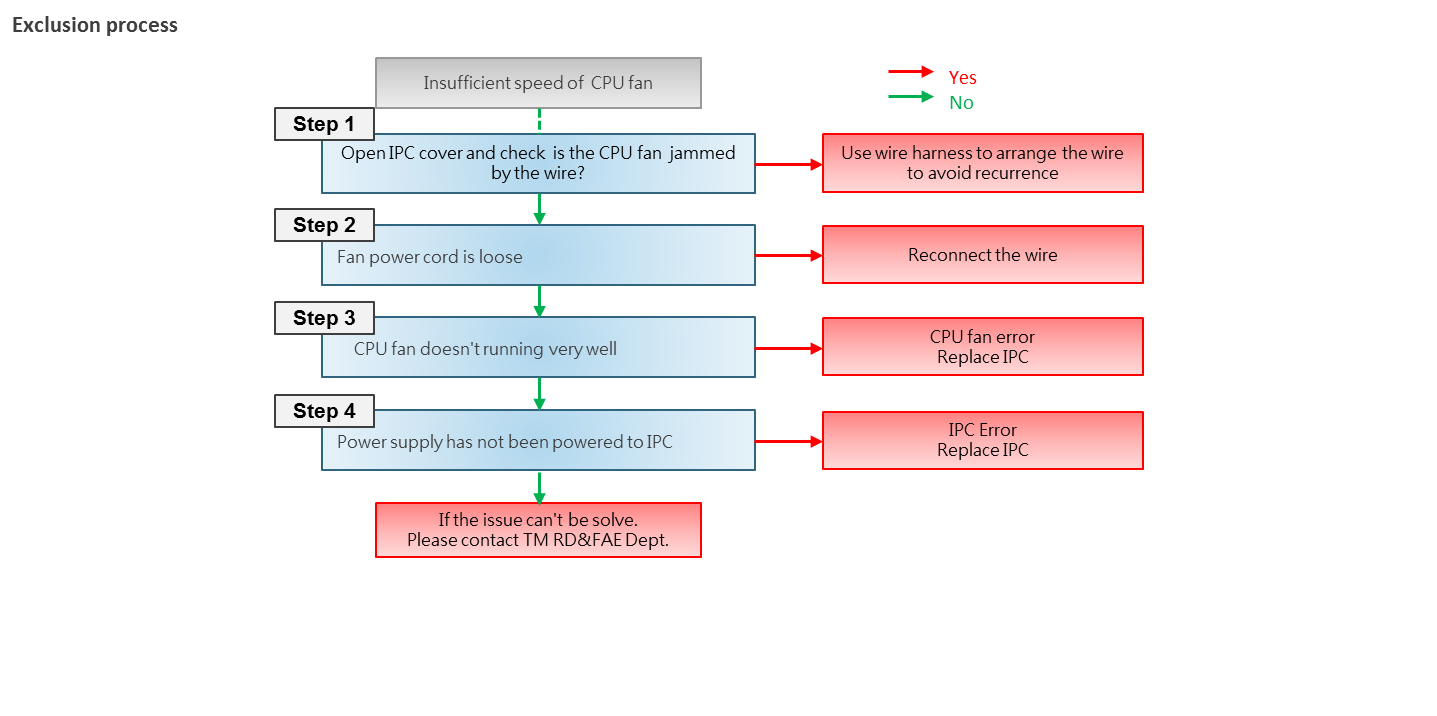
Insufficient speed of CPU fan #
| Case description | ||
| This section describes possible faults and recommended actions for each fault when the CPU fan speed is insufficient. | ||
| Result | ||
| When the HMI shows 0x00040015: The fan is below 1000 rpm, causing the robot unavailable to operate. | ||
| Possible reason | Common error code | |
| The following are possible symptoms of CPU fan that Insufficient speed:
1)CPU fan is jammed caused by the wire 2)Fan power cord is loose 3)CPU fan doesn’t running very well 4)Power supply has not been powered to IPC 5)Software bug |
0x00040015 | |
| Symptom |  |
|
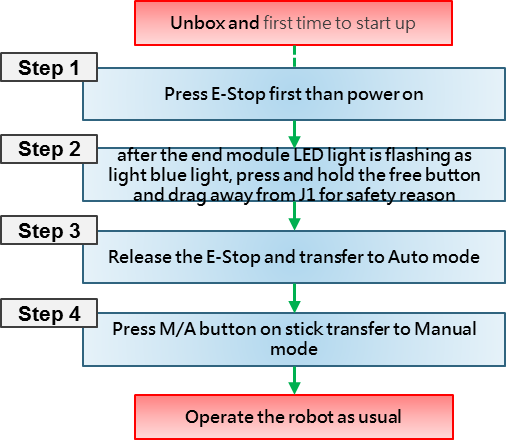
New robot unboxing and first time to start up #
| Case description | |
| This section describes the recommended actions when the new robot is unpacked and the initial start up mode. | |
| Result | |
| If the robot is not braked as the suggestion, the joint may cause an collision and get error. | |
| Steps of Operation
|
 |

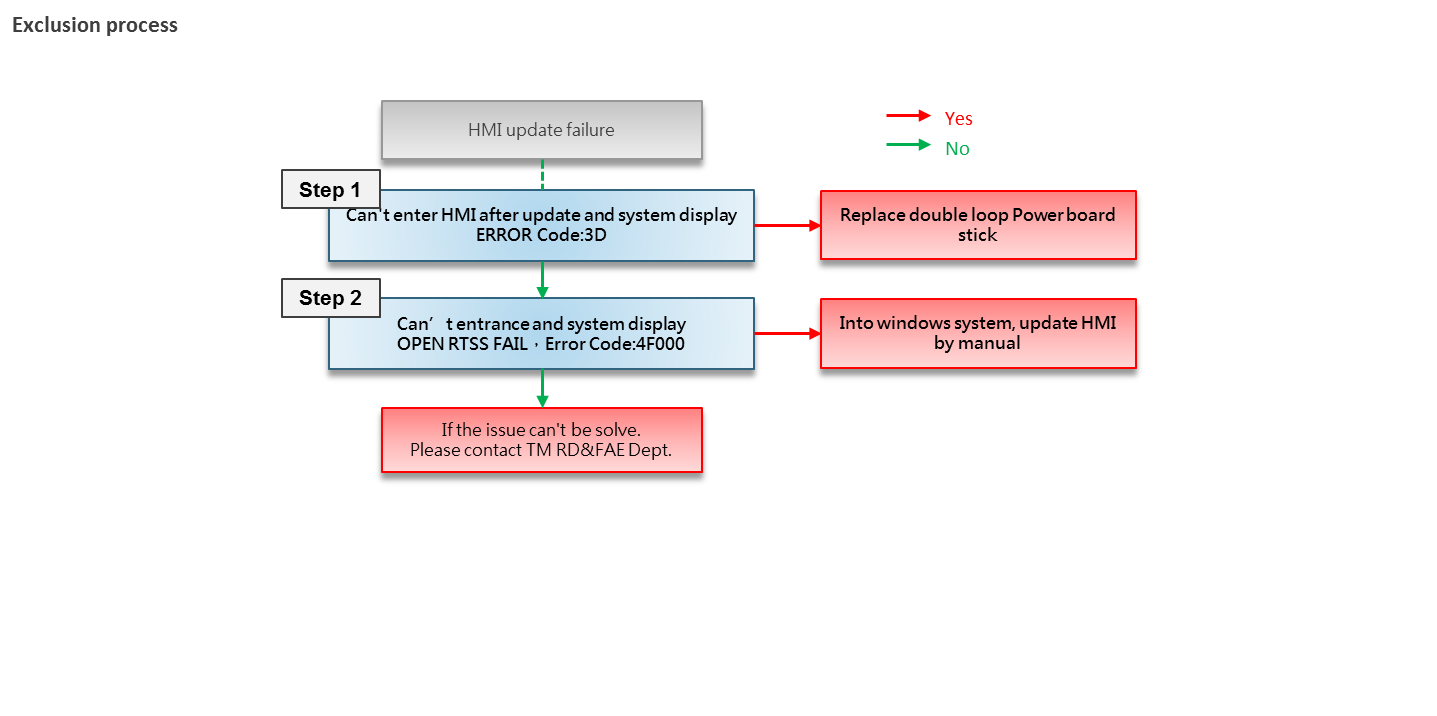
HMI update failure #
| Case description | ||
| This section describes the possible failures and suggested actions for each type of failure when the HMI update fails. | ||
| Result | ||
| 1.Updated to version after 1.64, the system displays Error Code: 3D
2.HMI update failure, system displays OPEN RTSS FAIL, Error Code: 4F000 |
||
| Possible reason | Common error code | |
| The following are possible symptoms of HMI update failure:
1)Using the single-loop Power board Stick, the system detects errors after updating the HMI version. 2)Version are quite different, causing FW and ESI to update Timeout |
0x0000003D
0x0000004F 0x0004F000 0x00045101 |
|
| Symptom |  |
|
Project open failure #
| Case description | ||
| This section describes possible failures and suggested actions for each type of failure when the project fails to open. | ||
| Result | ||
| When user enter the HMI to open the project, the system displays Load project file error. | ||
| Possible reason | Common error code | |
| The following are possible symptoms of Project open fail:
1)After saving the project shut down right away and cause some parts of the project damage which have not saved yet. 2)Unusual shutdown 3)During exporting the project , removed the USB device when exporting and cause damage to the export project file. |
NA | |
| Symptom | 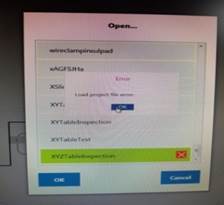 |
|
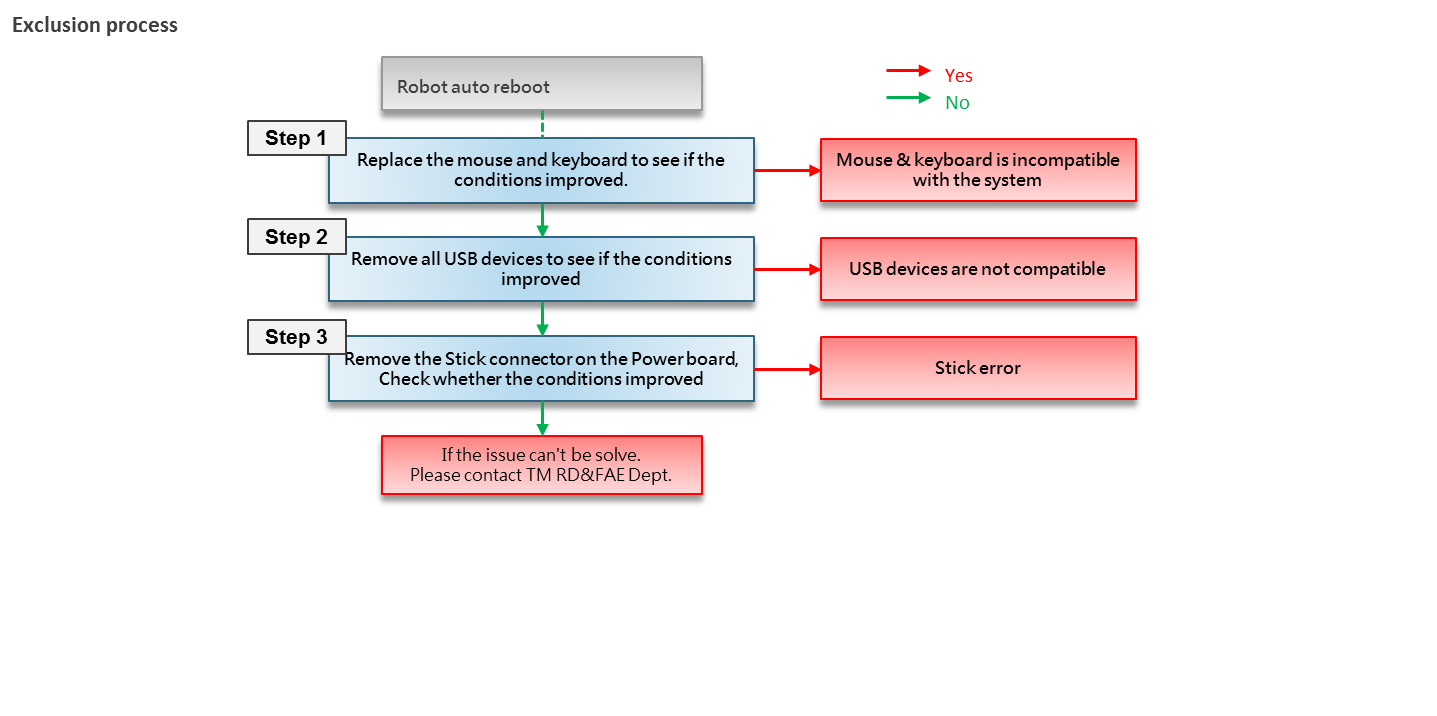
Robot auto reboot #
| Case description | ||
| This section describes possible faults and recommended actions for each fault when the robot is automatically restarted. | ||
| Result | ||
| When the robot is turned , the electric control box will automatically start and cannot be shut down normally. | ||
| Possible reason | Common error code | |
| The following are possible symptoms of Robot auto reboot:
1)The keyboard is incompatible with the mouse 2)USB related device is abnormal 3)Stick switch button is abnormal |
NA | |
| Symptom |  |
|
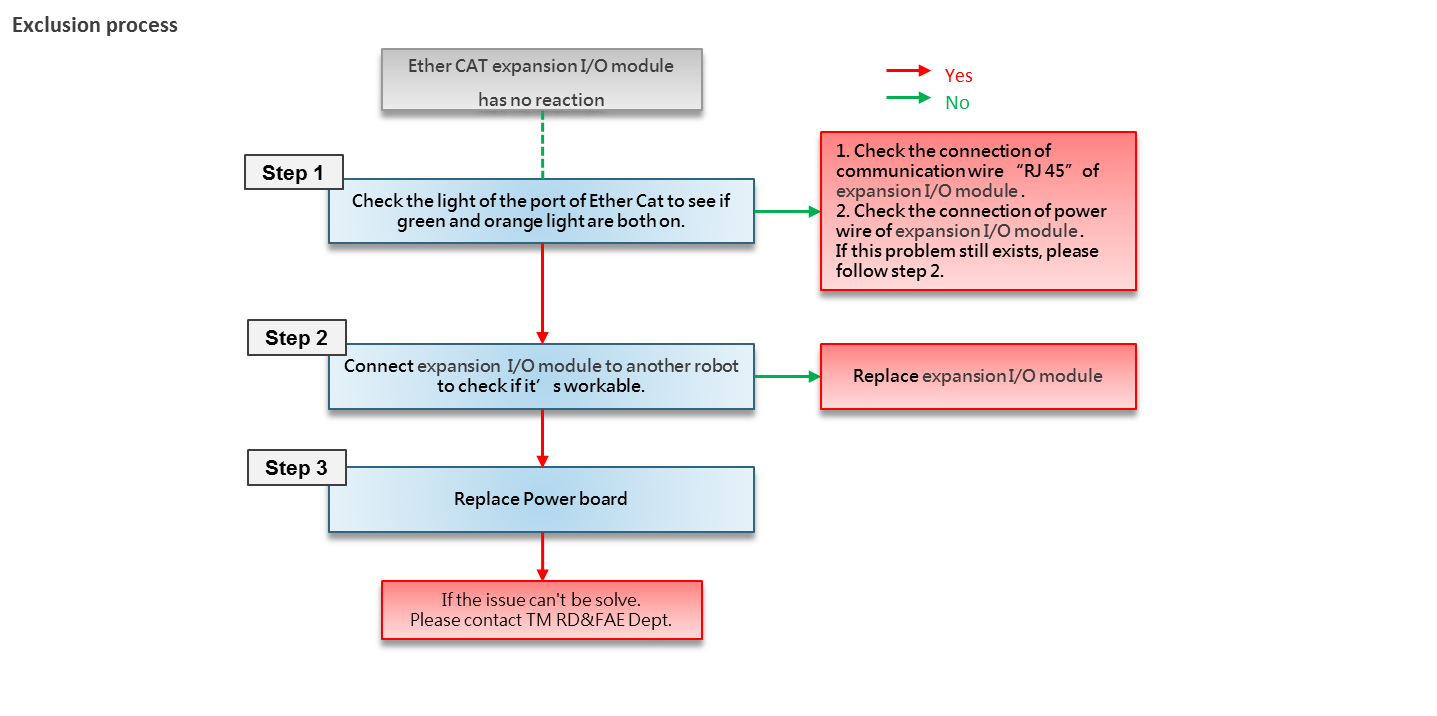
Ether CAT expansion I/O module has no reaction #
| Case description | ||
| This section describes possible faults and recommended actions for each fault when Ether CAT expansion I/O module has no reaction. | ||
| Result | ||
| Ether CAT expansion I/O module has no reaction, and HMI shows 0x00000050 | ||
| Possible reason | Common error code | |
| 1)Socket of Ether CAT on Power control board was broken.
2)External equipment was failed. 3)Connection for external equipment was failed. |
NA | |
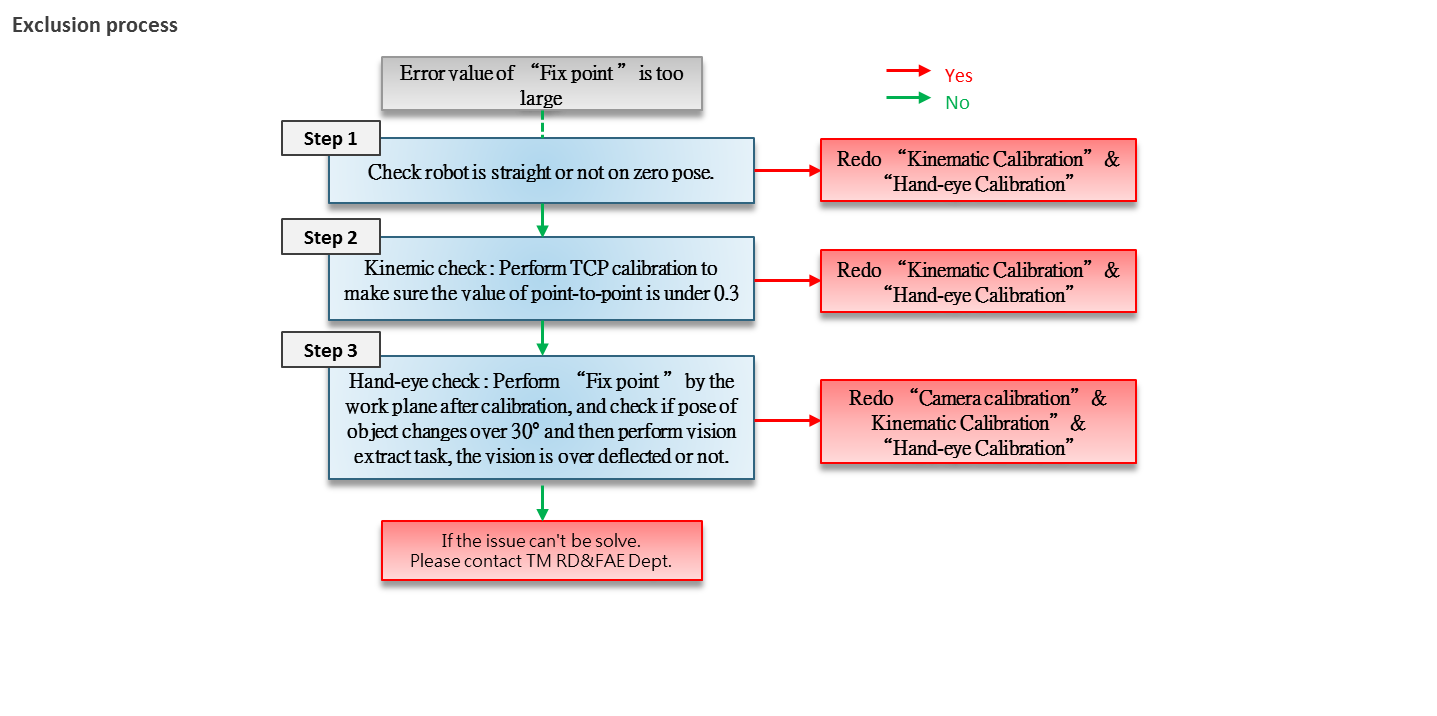
Error value of “Fix point ”is too large #
| Case description | ||
| This section describes possible faults and recommended actions for each fault when Error value of “Fix point ”is too large. | ||
| Result | ||
| The error value is too large after calibration of “fix point” | ||
| Possible reason | Common error code | |
| 1)Joint has shifted.
2)Robot is not straight on zero pose. 3)The error value of kinematic calibration is too large. |
NA | |
| Symptom |  |
|