此文章之範例適用於下列條件:
TMflow 軟體版本: 2.18 或以上。
TM 手臂硬體版本:HW3.2或以上。
其他特殊軟硬體需求: 無
請注意,新舊版本之差異可能導致操作介面、步驟上會有所差異。
Palletizing Development Kit 2.18 #
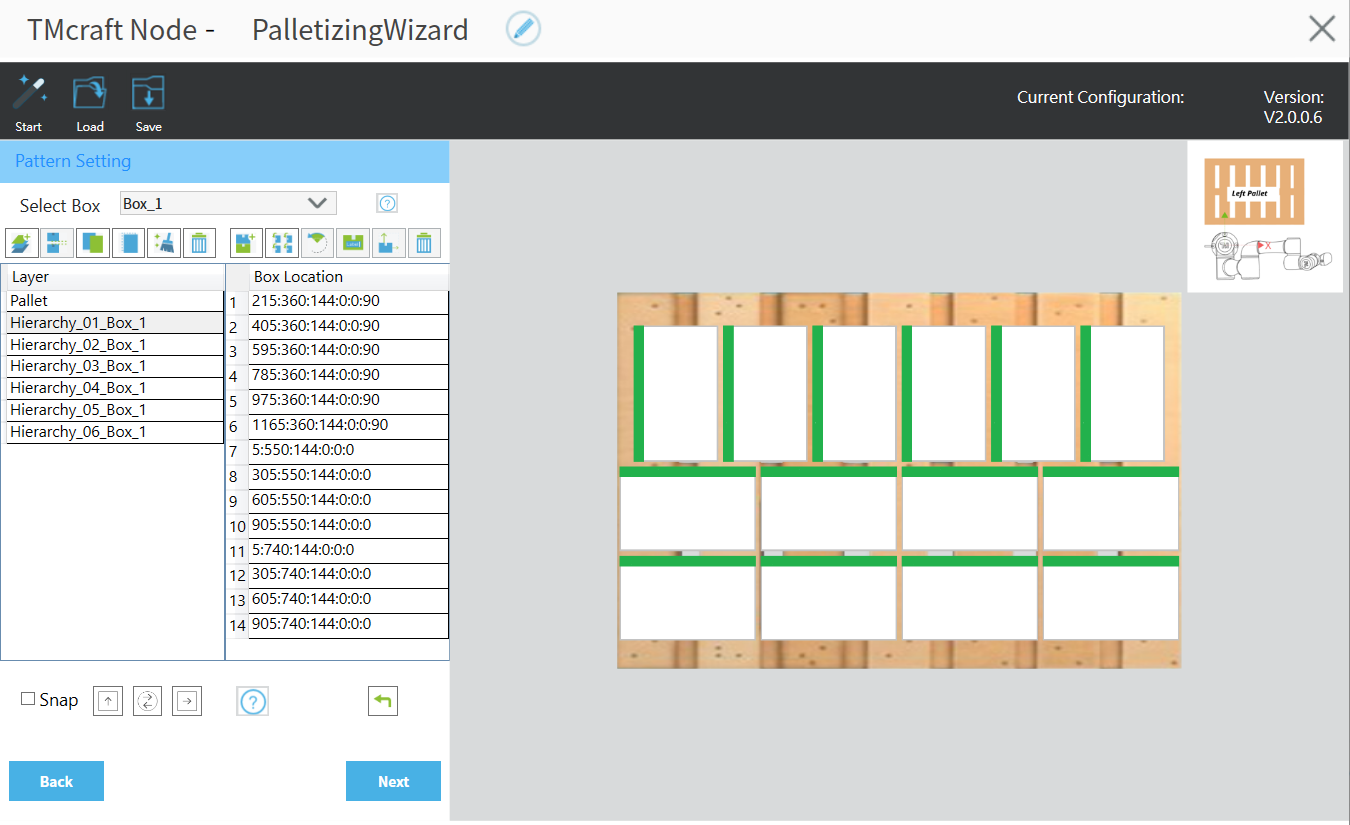
* 主要功能
- 提供由TMcraft開發的Palletizing Wizard,適用於TMflow。
- 適用於單一箱體固定來料堆棧。
- 堆解棧、換棧的最佳方案。
- 可自訂箱體、托盤尺寸、箱體排列模式,且彈性安排箱體順序。
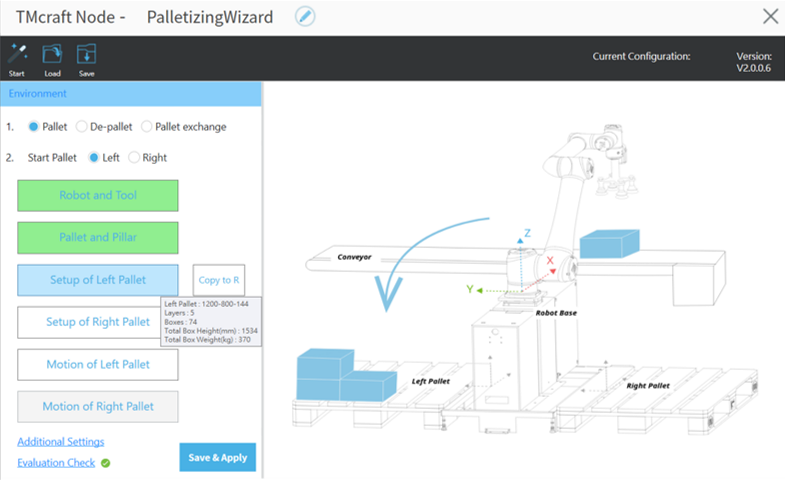
- 結合3D相機、實現混箱解棧。

使用者可以透過我們的下載中心下載並試用我們的 Palletizing Development Kit
TMflow 相關功能 #
* TMcraft 設定
- 讓第三方廠商客製化設定介面,協助使用者安裝解決方案(設備設定、連線設定、定義初始化腳本,等等)。
- 以C#/WPF使用者控制元件的方式開發TMcraft Setup,並透過TMcraft Packer打包檔案,然後匯入至TMflow上使用。
- 透過TMcraft Setup API開發者的TMcraft Setup程式能與TMflow作各種互動。

* IO Trigger 工作區間
- 使用者可以設定機器人之工作區間。
- 於專案內Operation Scene設置Plan或Cube
- 設置Plan:當機器人超過平面所包圍的區域會停止。
- 設置Cube:當機器人進入Cube區域會觸發DO。
- I/O Setup>User Define新增DO_9讓使用者可設定Operation Space output訊號。
- 啟用DO_9做為Operation Space output訊號時DO_9,不可由使用者或外部控制。

* 3D Viewer安全相關物件
- 於3D Viewer中加入可顯示Cartesian Limit A/B與Basic/Advance Safety Tool Point功能。
- 3D Viewer新增Show Button,根據對應HW版本,供使用者選擇欲顯示之空間項目。

* 持續啟動 TMflow
- 手臂故障時,開機系統除了能匯出LOG,也可匯出故障手臂內專案及相關設定。
- 手臂硬體發生相關故障、連線異常或開機時按下ESTOP(HW 3.2)可於進入System Failure Reporter頁面時,按下 Booting鈕,確認進入TMflow匯出復工所需資料。

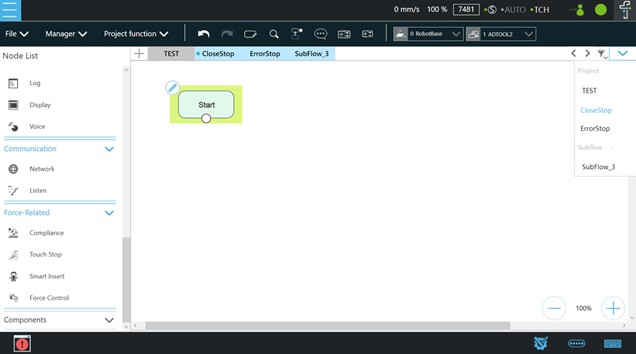
* 專案停止與錯誤停止處理程序
- 使用者可於特殊subflow中規劃專案停止或錯誤停止後需執行之動作。
- 新增特殊頁籤:CloseStop與ErrorStop
- 此特殊頁籤不可變更名稱與刪除
- 其機制比照Script專案之CloseStop與ErrorStop函式不可執行運動相關流程,且12秒後強制結束。
- 與Thread相同,僅可以使用部分節點:Set、If、Wait for、Gateway、Stop、Goto、New Base、Script、Log、Display、Voice、Network。
* 運動節點設定界面最佳化
- 於Circle與Pallet節點內調整點位細節。
- 將Circle & Pallet節點教導點位行為與畫面一致化。
- 新增修改當前點位功能(Value Modify)。

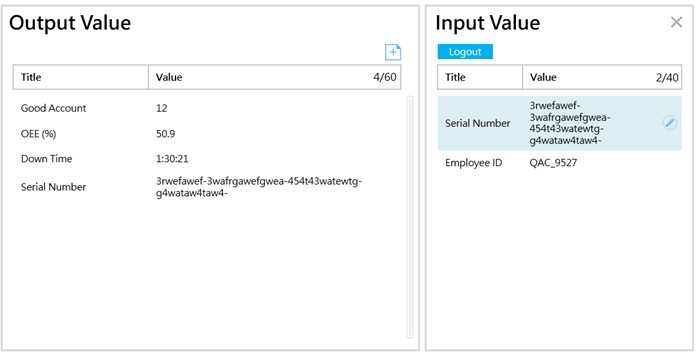
* 檢視–顯示板–變數顯示重新設計
- 讓變數顯示更具彈性方便使用。
- 允許內容顯示和變數顯示並排。
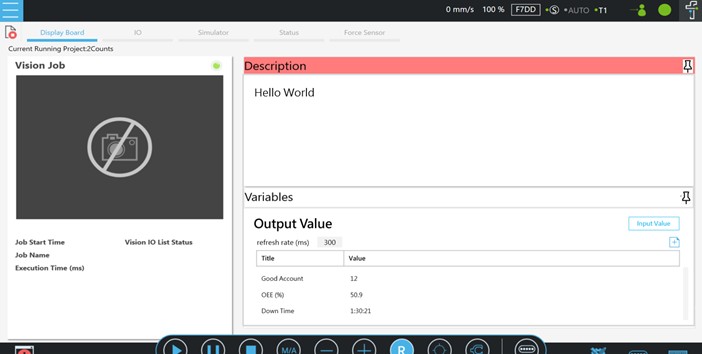
- 使用者可於專案運行中臨時加入變數顯示(輸出值)。
- 變數顯示最多能包含60項輸出值與40項輸入值。
* TMflow中配置Auto TCP校正
- 使用者可利用TMflow配置內建之自動TCP校正功能。
- 可完全取代TMflow 2.14內建 TCP校正與 TMflow 2.16 Auto TCP校正專案化,並新增下列優勢
- 內建 TCP校正位於工具設定頁面,具備直覺簡單的UI引導。
- 完成基本設置後,即可全自動運行校正。
- 校正花費時間更短,校正過程能夠調整手臂移動速度,且隨時都能暫停。
- 自定義點位,支援任意形狀的工具。
- 支援更多參數設置。
- 校正頁面中能夠隨時保存校正參數,並能自動調整相機參數。
- 碰撞檢查。
- 與手動 TCP 教導相比,有更高的校正穩定性與準確度、操作更加直覺。
* 通過奇異點動作改善
- 提供加強穿過奇點周圍區域時動作之方法,而非突然停止。
- 定義TMflow中奇異點處理功能:

- ”奇異點處理”功能僅於Point節點與Move節點中選擇直線運動時可啟用。
- 啟用”奇異點處理”時,機器人經過奇異點時會改變速度(奇異點如J5接近0°±5°或180°±5°)。
- 此功能僅於奇異點未發生在路徑起點或終點位置時有效。啟用此功能後,將不會進行至下一點的軌跡混合功能
* 重新定義快捷鍵功能
- 強化TMflow快捷鍵功能,提升使用者體驗。
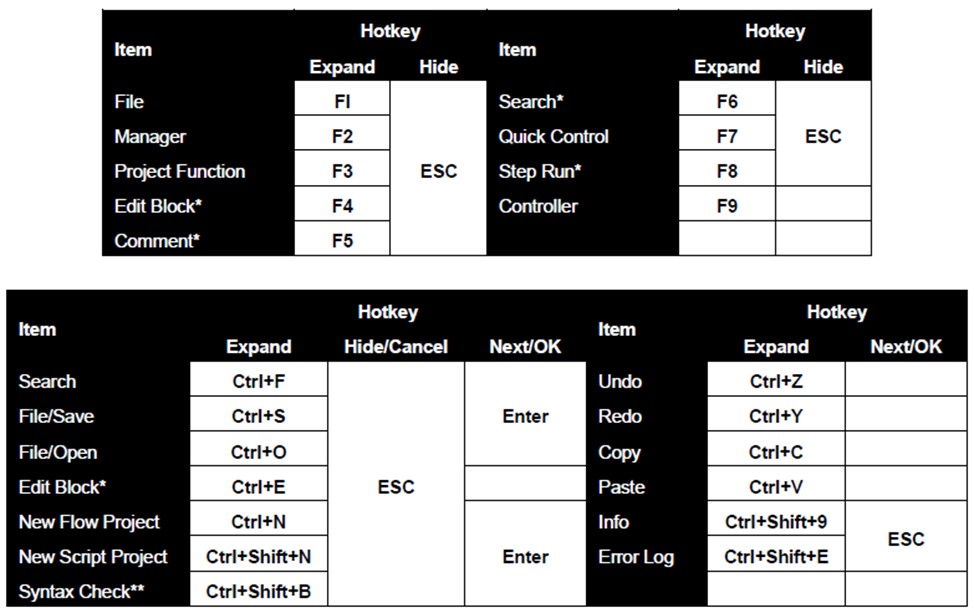
*Flow 專案專屬
**Script 專案專屬
* 重新定義運動節點之有效負載設定
- 運動節點內Payload設定簡化為No Change與Change。.
- 選擇Change後,使用者可由輸入數值改變負重或由F/T感測器改變負重二選一。
* Quick Access & Search
- 避免使用者找不到欲使用之Node,新增Quick Access類別,讓使用者可以將常用Node釘選至Quick Access。
- Quick Access釘選上限12個。
- Node List旁新增搜尋欄位, 使用者可於欄位內輸入欲尋找之Node名稱。
* 工具設定改善
- 於專案頁面工具清單新增Tool Settings入口,避免使用者需要離開Project頁面尋找。
- NOTOOL 工具列表中已更名為 RobotEndFlange,以提供更清晰的功能理解。
- 改進當用戶選擇 RobotEndFlange 時顯示的警告和提示信息。
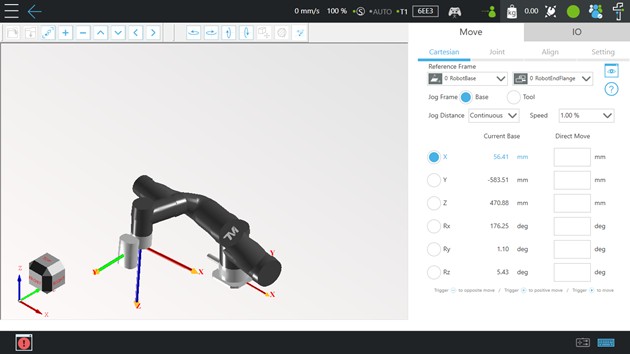
* 控制器改善
- 考量其常用性,調整控制器功能入口於下方工具列,使用者在任意頁面都可以快速開啟控制器,不須多餘步驟至到特定頁面。

- 控制器頁面調整規劃,新增Align功能,機器人可自動對齊選擇的Base。
* Script Node改善
- Script node編輯畫面加大。尺寸固定不得變更。
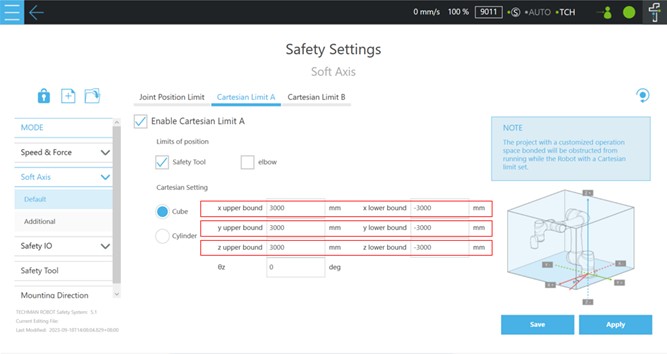
* 增加Cartesian Limit內自由度
- 修改Cartesian Limit A與Cartesian Limit B輸入值上下限為±3000。

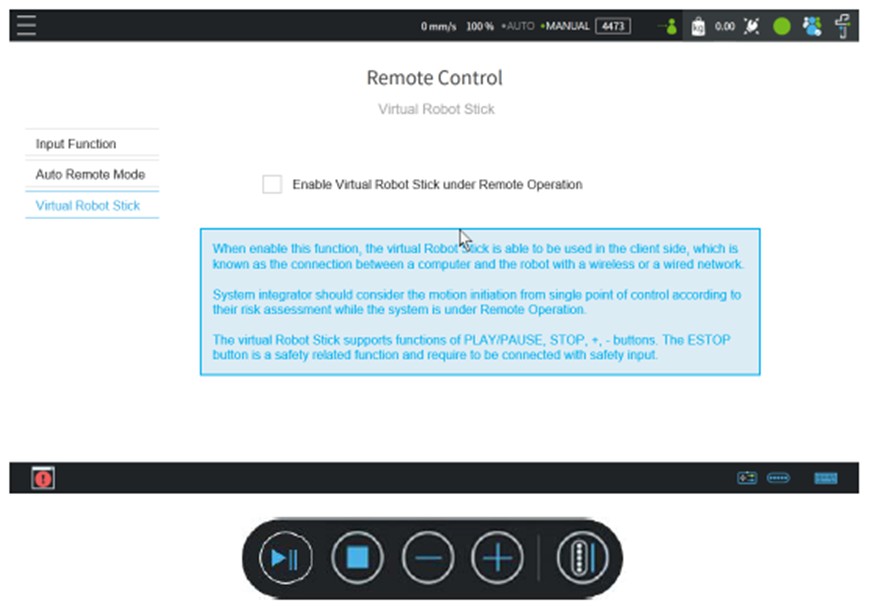
* 虛擬機器人控制棒
- 可於無實體佈線環境操作機器人
- HW 5.0
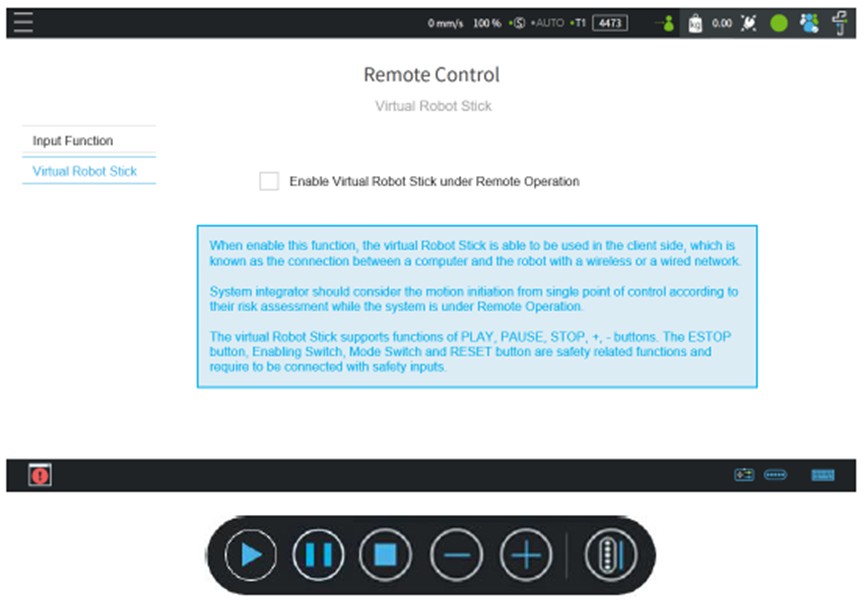
- HW 3.2
視覺任務相關功能 #
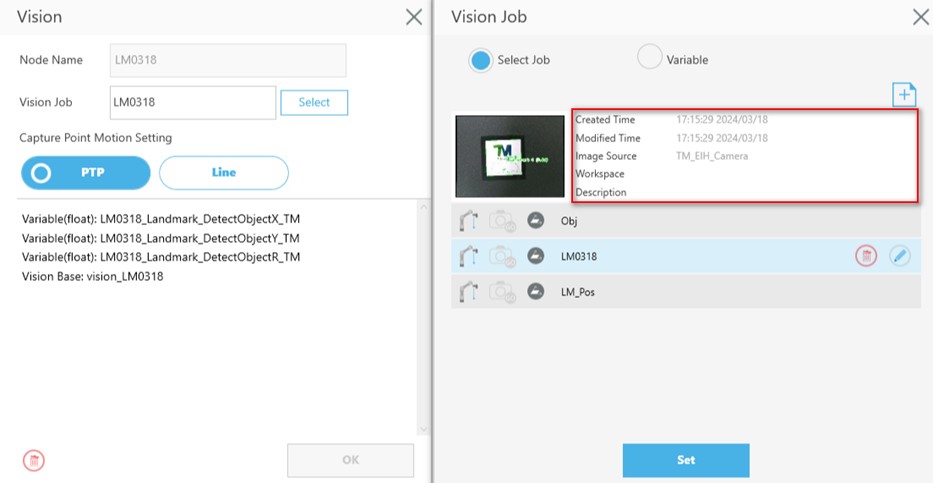
* 視覺任務描述
- 於Vision Node中,使用者無需開啟即可得知各Vision Job主要功能。
- 描述資訊位於視覺任務列表上方。
- 任務列表以icon形式顯示其應用類別、拍完即走狀態、拍照點類型。
- 描述資訊包含結果圖、建立時間、編輯時間、影像來源、工作平面與任務描述。
* 視覺定位檢測Node
- 使用者可以直覺得知視覺功能分為定位與檢測2種應用。
- TMflow專案中新增AI Vision群組,並加入Positioning與Inspection共2個Node
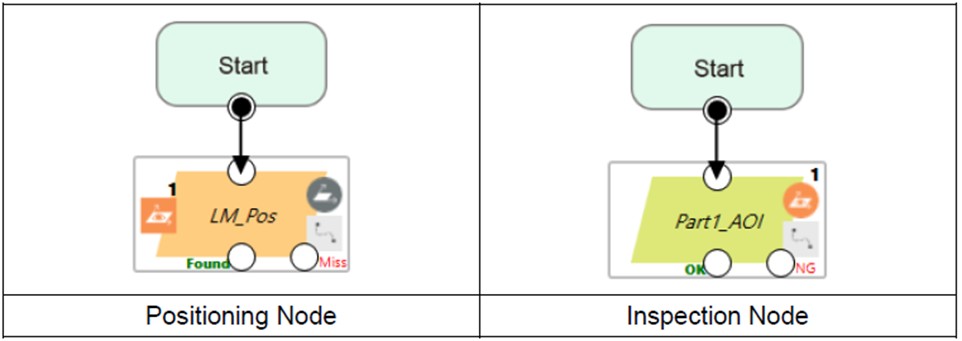
A. Positioning節點能建立或開啟的視覺任務為定位類別:物件定位、Landmark定位、物件伺服式、Landmark伺服式、物件校正、Smart-Pick。
B. Inspection節點能建立或開啟的視覺任務為檢測類別:AOI辨識、視覺IO。
- Script專案管理員之Vision拆分為Vision Positioning與Vision Inspection。
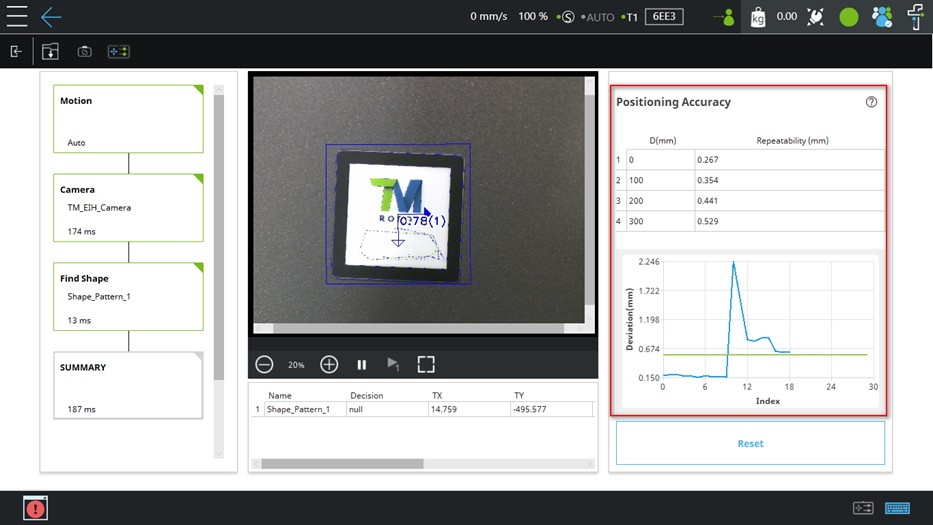
* 視覺定位精度
- 在視覺定位任務中顯示定位精度。
- 完成定位任務後,可於SUMMARY檢視重複精度(Repeatability)和誤差(Deviation)。
* 分類視覺流程參數
- 視覺流程參數分為以下類別進行設定:參數設定、進階參數設定、判定條件(僅支援Inspection任務)、顯示設定

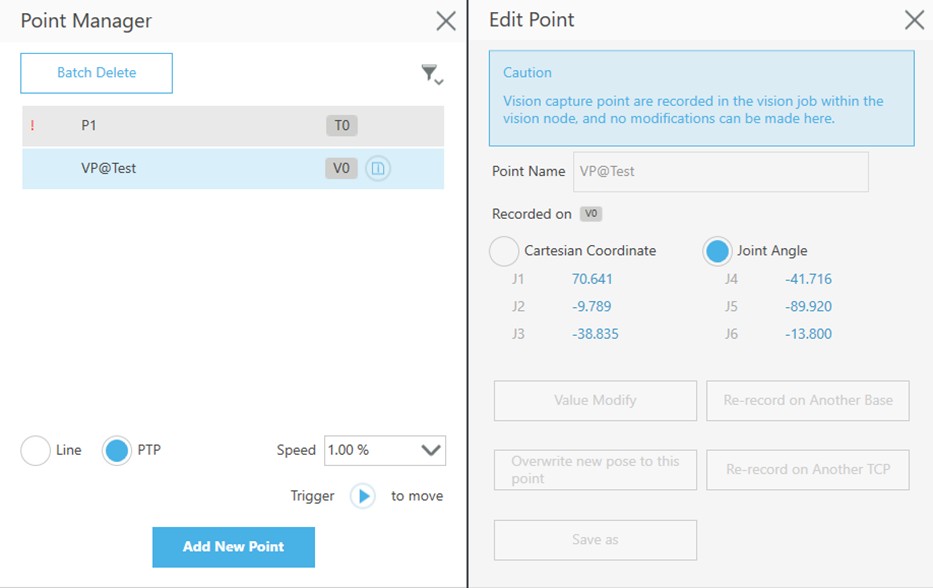
* 視覺任務拍照點加入點位管理員
- 於點位管理員中檢視視覺拍照點(VP)資訊。
- 視覺任務的拍照點位加入點位管理員,點位名稱格式為:VP@視覺任務名稱。
TM AI+ related Features #
* Instance Segmentation (實例分割)
- 使用者可利用實例分割模型進行像素級物件偵測並精確定位。
- 使用者可於實例分割中編輯資料集時對標籤進行註釋,而一個標籤可帶多個實例。

- 實例分割之評估樣本有Actual/Predicted/Heatmap三種。顯示結果有Label Mask,Instance Mask,與Bounding Box。Label Mask意指同Label有相同顏色,Instance Mask為所有Instance有不同顏色,Bounding Box為Mask之最小外接矩形面積。

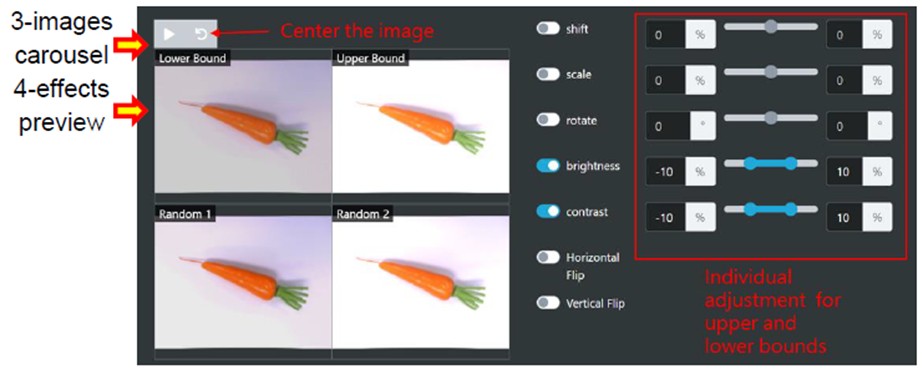
* 資料集影像增強效果顯示
- 使用者可見資料集影像增強效果。
- 資料集影像增強效果。
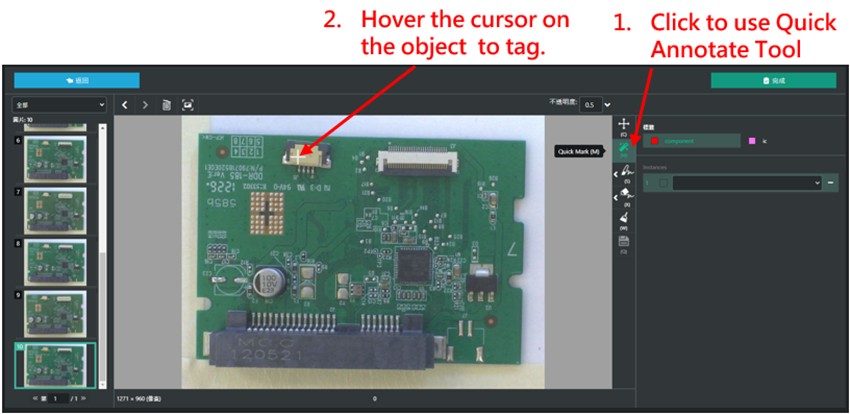
* 分割標記之快速標記工具
- 使用者可加速標記物件過程。
- 分割標記新增快速標記工具。
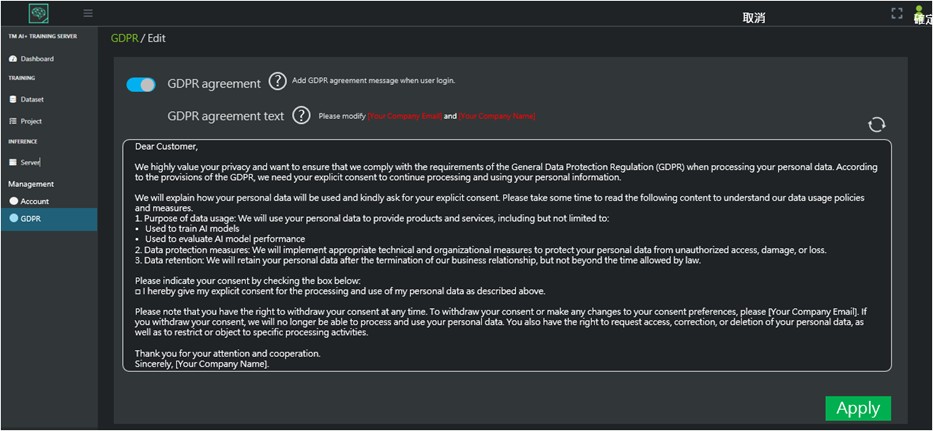
* 通用資料保護規則
- 使用者可遵循歐盟資料保護規則。
- GDPR頁面內建條文範本,Admin權限可修改內容,或恢復為預設範本。
- Admin權限可啟用/停用GDPR功能。預設為停用,設定完成後須點擊Apply始可生效。
* 支援同一裝置同時安裝Training Server與Image Manager
- 使用者可於同一主機上安裝Training Server與Image Manager.
- 不論安裝順序,Training Server與Image Manager可安裝在相同的電腦中。
- 當Training Server與Image Manager安裝於同一主機時,僅保證個別獨立運行時正常,同時運行時則不保證。軟體版本不須相同,但皆須為18或以上。
- 該主機硬體規格、作業系統、環境設定必須同時符合軟體需求。
更多功能 #
* Script改善
- TM Script 新增:
- New base operation functions, ConvShift() and BaseShit(),to convert the new base value with the teach value and the shift value.
- Class and functions that align with TMflow: MDecison, Collision Check, Listen Node.
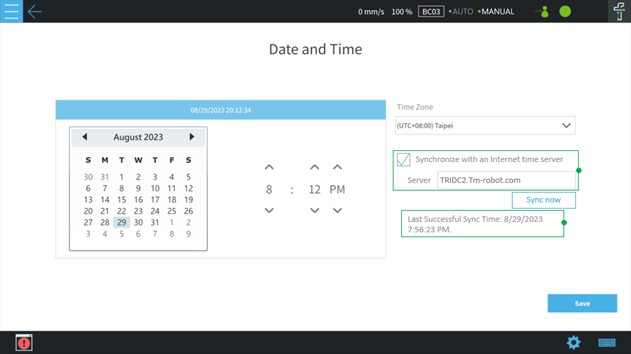
* 新增NTP Server選項
- 使所有機器人時間同步,於生產履歷或異常紀錄確保其時間點一致。
- 啟用時,開機自動同步更新,之後每一小時更新並顯示更新訊息。訊息持續保留至下次更新或關機。
* 支援Photoneo Alpha 3D掃描儀
- Photoneo Alpha 3D掃描儀適用於堆解棧場景
- 透過Photoneo Alpha 3D掃描儀進行3D視覺定位。
- Alpha系列各尺寸(L/XL)掃描儀的拍攝距離廣,能掃描大範圍區域,適用於堆解棧。

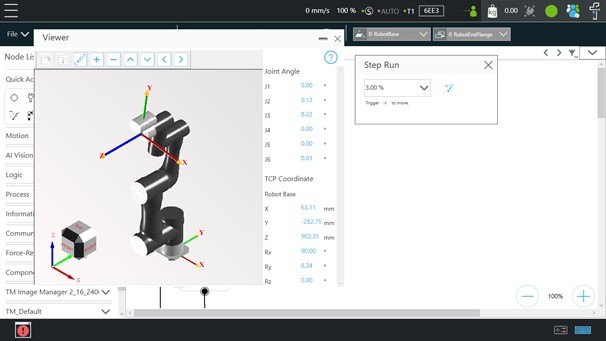
* 單步執行增加Viewer鈕
- 使用TMflow Simulator時,使用者可如真實操作robot般驗證robot運動。
- 點擊該鈕時可開啟viewer視窗。
* 新增SRI_M4313N3C至力規清單
- 使用者可選擇SRI_M4313N3C作為力規。


