Table of Contents
此文章之範例適用於下列條件:
TMflow 軟體版本: 1.76.6300 或以上。
TM 手臂硬體版本:所有版本皆適用。
其他特殊軟硬體需求: 無
請注意,新舊版本之差異可能導致操作介面、步驟上會有所差異。
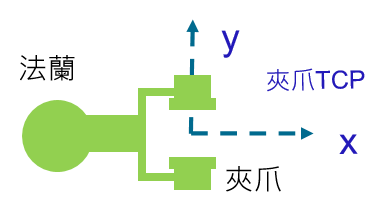
何謂工具中心點(TCP)? #

TCP(Tool Central Point)
- 當我們控制機器手臂去接近空間中某一點時,本質上就是讓TCP去接近該點
- 機器人可以有多個TCP,但同一時刻,機器人只能處理一個TCP
如何校正TCP #
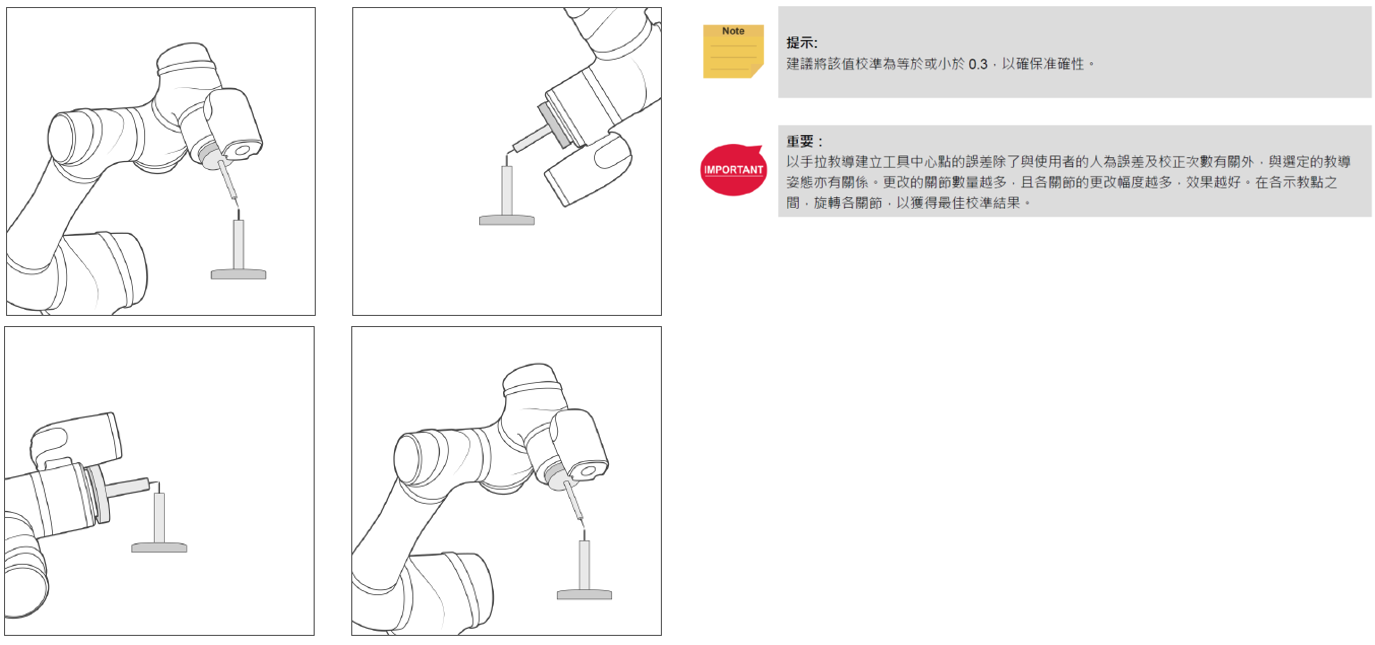
Tips
- 建議將該值校準為等於或小於0.3,以確保準確性
- 校正TCP時,盡量在J6上產生不同角度的旋轉
- 校正尖端盡量不要在法蘭中心的延伸軸上
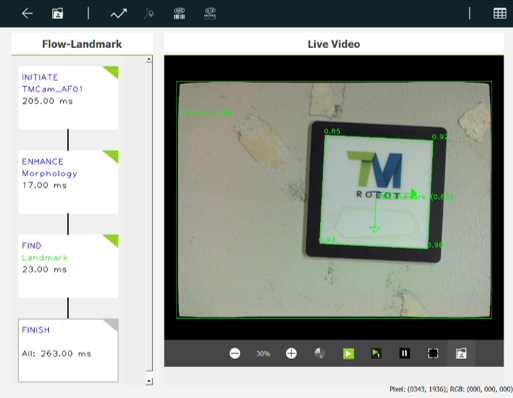
建立視覺座標系(Vision Base) #
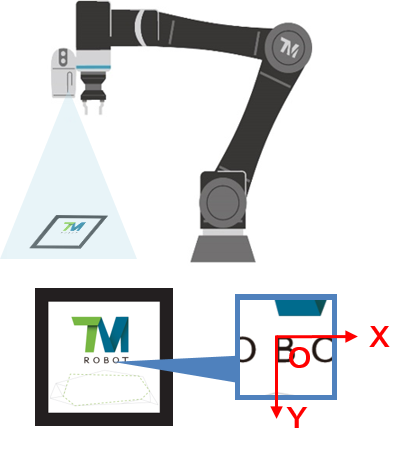
定點式Landmark
- 座標系原點位於Landmark中心(B字的左上角)
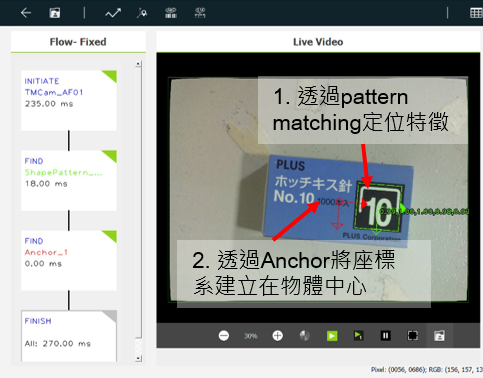
定點式定位
- 座標系原點在於Find物件圓圈中心位置可透過錨點(Anchor)功能調整原點位置
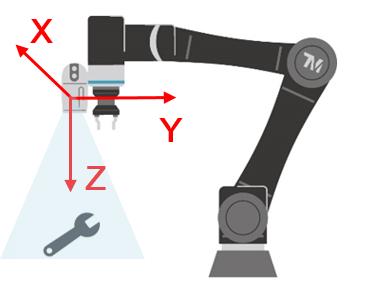
伺服式定位
- 伺服到位後,座標系原點為於EIH相機的空間位置,軸向等同於TCP HandCamera之軸向
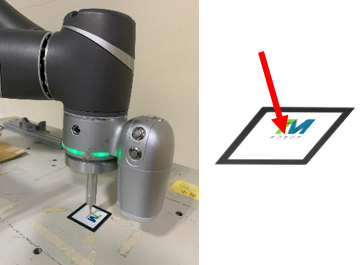
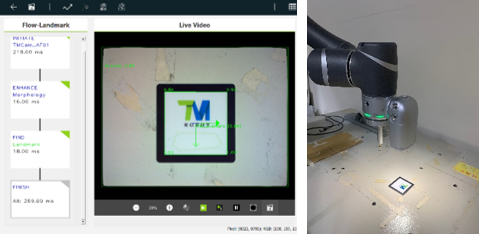
連結Vision Base與TCP #
- 校正TCP
- 建立視覺定位任務,例如Landmark定點式定位
- 設定視覺Base與TCP

- 移動到(0,0,0),則校正尖端會位於Landmark中心位置
- 移動到(20,0,-5),則校正尖端會位於中心右側邊線上方5mm位置

TCP: HandCamera #
所有EIH相機的手臂,都可以在TMflow任務編輯頁面中,找到名為HandCamera的TCP,這個TCP是描述EIH相機座標系原點相對於法蘭的關係,對於Landmark定位的任務,可以試著利用它:
- 粗定位:透過較遠的位置偵測Landmark,確保其出現於視野內,建立第一Vision Base

- TCP設定:將TCP設定為HandCamera,將其移動到第一Vision Base的(0,0,-150)位置

- 細定位:建立第二視覺Base,此時Landmark會出現於視野內,並距離相機150mm,可得到更精準的定位結果
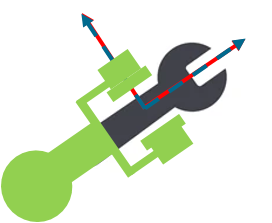
物體有旋轉-TCP的設定 #
當物體有旋轉,TCP的設定就很重要!
- 為工件建立視覺Base
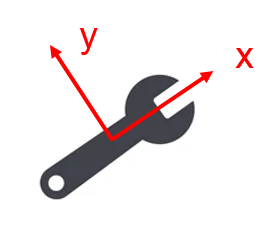
- 設定TCP
- 設定取物位置
- 將夾爪原點對齊視覺Base原點
- 沒有設定TCP,法蘭離視覺Base有一個相對的距離與角度
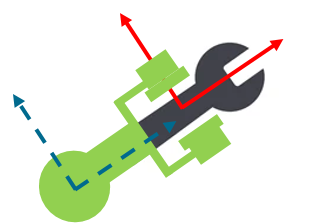
- 將夾爪原點對齊視覺Base原點


