此文章之範例適用於下列條件:
TMflow 軟體版本: 2.16 或以上。
TM 手臂硬體版本:僅提供 HW3.2 或以上。
ROS 版本:ROS 2 Foxy
其他:已懂得安裝和基本使用 TM ROS 驅動程式
請注意,新舊版本之差異可能導致操作介面、步驟上會有所差異
TM ROS Driver可以從視覺任務(外部物件偵測)接收源影像並將其發佈為ROS Topic。用戶可以按照以下步驟進行操作。
請將 TM ROS Driver 儲存庫複製並建立到相應的工作空間.

運行TM Vision ROS Driver,

然後,在機器人上,創建並編輯流程項目中的一個Vision Node。

設置AOI-only為視覺作業類型。設定正確的初始位置和相機參數。

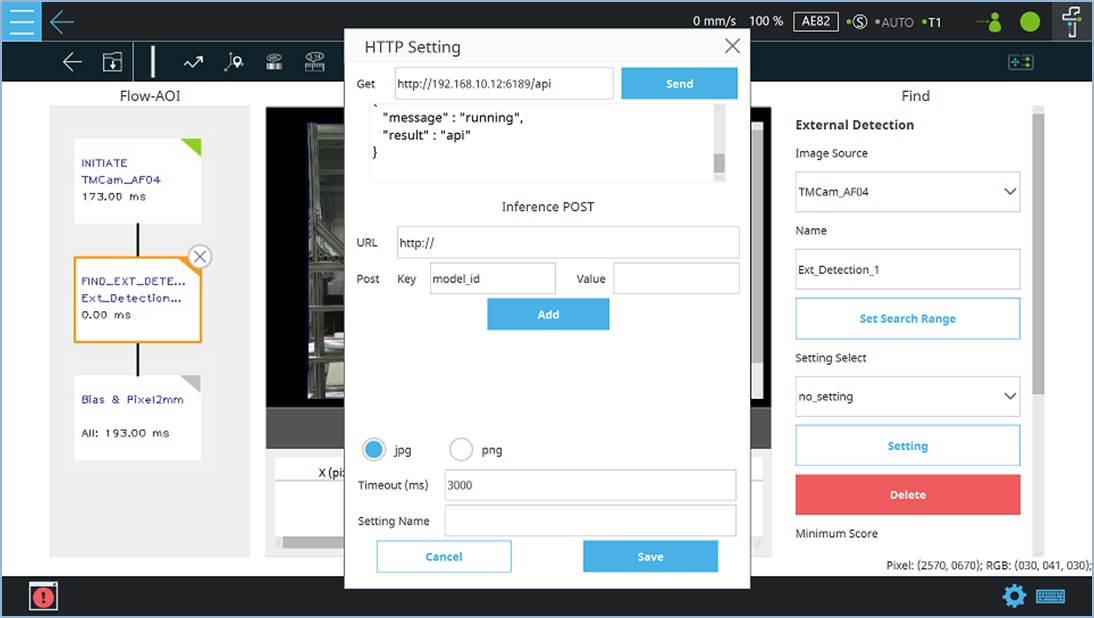
然後,選擇「Find > External Detection」,這將在視覺工作流程中新增一個外部物件偵測節點。

現在,設置外部檢物件測功能。為了測試與TM ROS Driver的連接,請在「Get」中輸入http:// <ip address>:6189/api,然後點擊「Send」。這裡的<ip address>是運行TM Vision ROS driver的電腦的IP地址。如果一切正常,文本框將收到以JSON格式呈現的消息。接著,將Inference POST的URL設置為http:// <ip address>:6189/api/DET,並設置其餘的參數。有關外部檢測的更多資訊,請參閱《Software Manual: TMvision》。
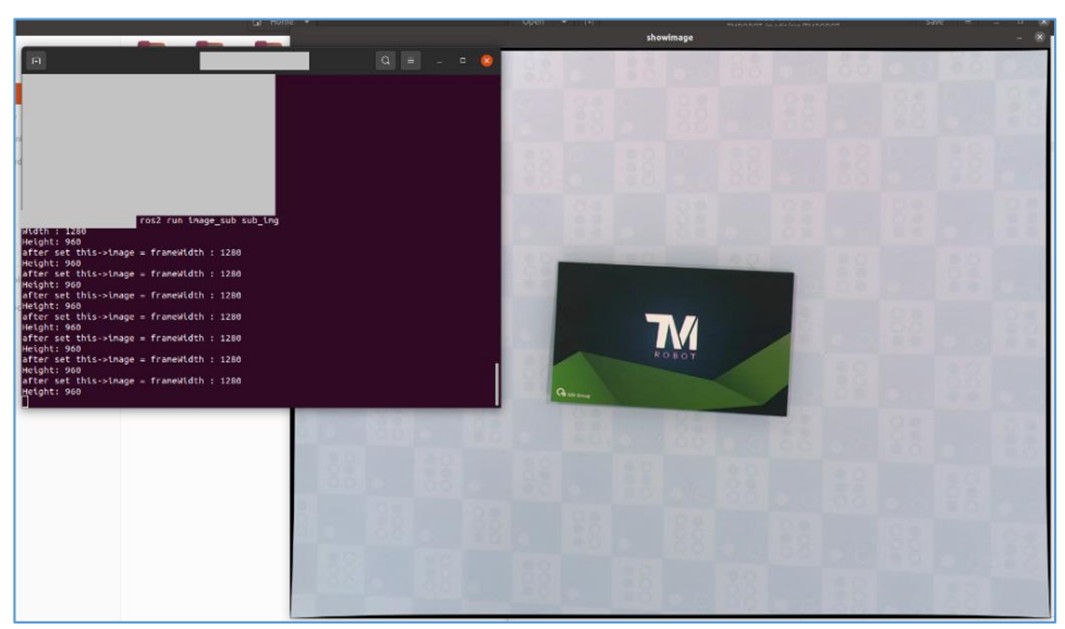
圖像 topic(techman_image) 將在流程專案運行後開始發佈。另外,使用者可以使用他們自己的 ROS Node 訂閱這個圖像topic,或者在儲存庫中運行範例程式