Table of Contents
此文章之範例適用於下列條件:
TMflow 軟體版本: 1.76.6300 或以上。
TM 手臂硬體版本:所有版本皆適用。
請注意,新舊版本之差異可能導致操作介面、步驟上會有所差異。
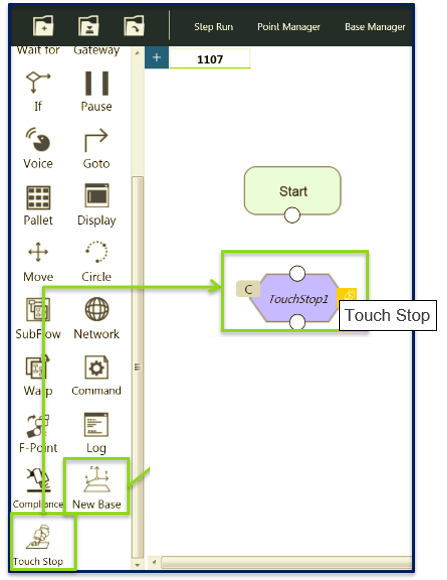
Touch Stop目的 #
依法蘭面與Tool,從起始點位向某一軸移動(如Z軸),通常利用I/O接收、外力抵抗當停止條件使用。
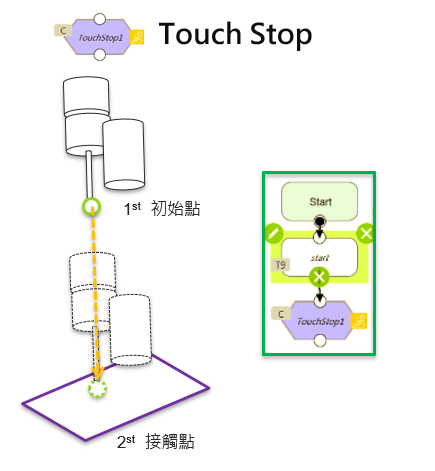
從初始點位使用Compliance 或 Line 的方式進行移動,使用有tolerance的Tool,當下壓至一定距離時,Tool送出I/O訊號給手臂、記錄跳脫後的手臂點位,並以此為Touch Stop node的跳脫條件。
一般應用:Tray盤計算層高


Motion Setting : 使用 Compliance 、 Line、力量感測 三種方式進行移動
Coordinate Choose : 依 Tool Base 或 Current Base 進行移動
Setting : 設定頁面
#
單軸移動 #
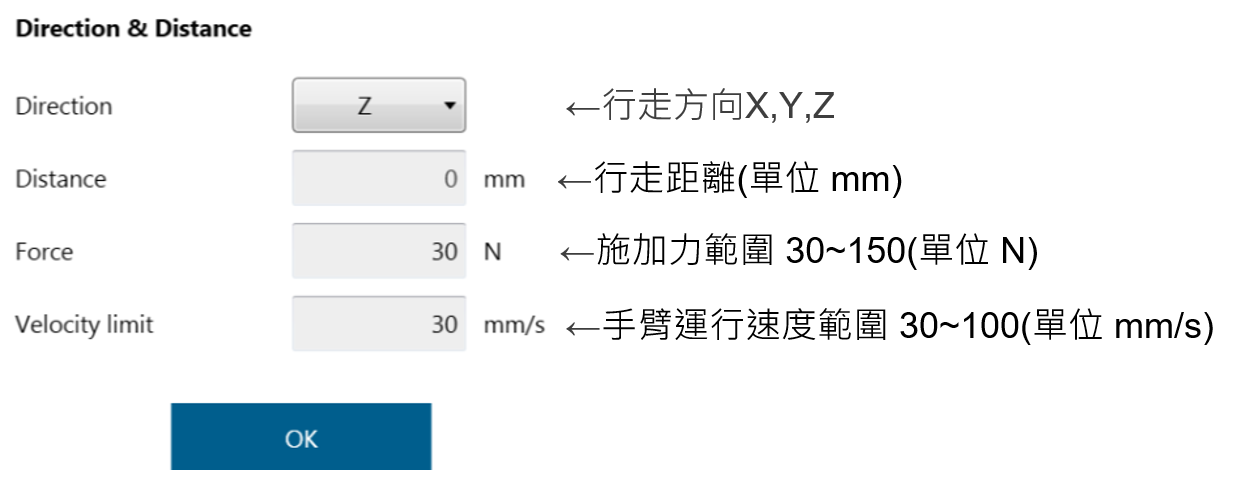
教導 #
教導分為直線方向跟旋轉,計算你教導的距離與旋轉角度

停止條件 #
- Time out :設置多久時間後停止並跳脫此Node
- Resisted : 感受到一反抗力後停止並跳脫此Node
- 反抗力大小因Setting內Force而定,設置越大反抗力就需要越大
- Digital IO : 設置一個數位Input 訊號作為停止並跳脫此Node,例如吸盤的IO
- Stroke % for DIO Detection :當行走距離超過相對百分比將會有不同INT值輸出給變數進行判斷
- Variable : 設置 Stroke % for DIO Detection 接收變數
- Analog IO :設置一個類比Input 訊號作為停止並跳脫此Node
Touch Stop – Line #

Motion Setting : 使用 Compliance 、 Line、力量感測 三種方式進行移動
Coordinate Choose : 依 Tool Base 或 Current Base 進行移動
Setting : 設定頁面
Stop Criteria:
- Digital IO : 設置一個數位Input 訊號作為停止並跳脫此Node。
- Analog IO :設置一個類比Input 訊號作為停止並跳脫此Node。
- Brake Distance : 設置踩煞車的距離,如 Setting 頁面 Distance 設置為100mm,Brake Distance 設置為 80mm ,則手臂末端從初始位置到運行80mm後會踩煞車停止。
此處的Line與Compliance的Line應用差異在於Line是做位置控制(無法選力量抵抗當停止條件)。Compliance是做力量控制末端會有軟浮動效果
Touch Stop – Force Sensor #

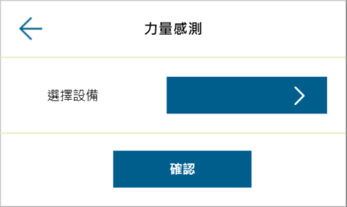
僅提供TM支援的FT sensor
Touch Stop – Force Sensor(Record Stopping Position on Point ) #
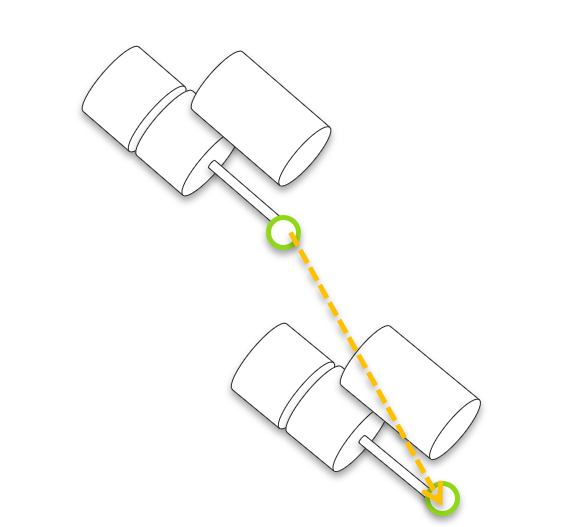
完成或是達到停止條件,即可紀錄此點位(如上圖)
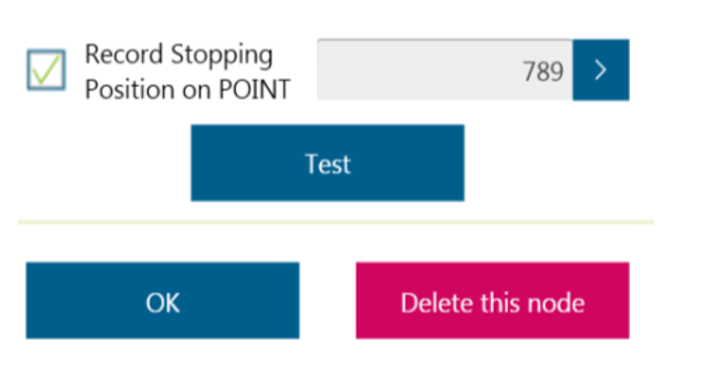
這可以將跳脫後傳送當下的跳脫點位


