Table of Contents
此文章之範例適用於下列條件:
TMflow 軟體版本:2.14 或以上。
TM 手臂硬體版本:HW3.2 或以上。
請注意,新舊版本之差異可能導致操作介面、步驟上會有所差異。
安全相關功能 #
達成ISO 10218-1新規範 #
- 將傷害降至規範與正常/規劃使用零件組裝與物質乘載處理之可容忍程度。
- 著重於(已做過風險評估的)人機合作作業應用程序之安全性。
- 嚴格遵循ISO 10218-1發展新方向
安全配置工具 #
- 配置工具為TMflow安全頁面上之軟體,供使用者以安全相關參數(如:停止標準/安全監控功能之限制或空間/關節限制範圍)、暫停(靜音)功能、或安全設定設置安全功能 (如:手動重置或自動重置)。
- 提供配置工具之密碼以確保安全。使用者可以透過使用管理更改密碼
匯出/匯入安全配置檔案 #
- 點擊Import/Export中的Export ,匯出所選的安全配置檔案。或點擊Import/Export中的Import ,將所選的安全配置檔案匯入指定的手臂。
復原模式 #
- 此模式供使用者修復安全觸發情況並恢復正常操作。
單點控制: 本地控制 & 遠端控制 #
- 本地控制與遠程控制的切換方法與機器人控制棒之啟用/禁用功能有關。
- 使用者以機器人控制棒操作機器人,機器人將完全於本地控制,確保機器人不透過接收週邊命令進行動作。
- 在遠程控制下,機器人控制棒之功能將被解除。. 使用者可透過配置一個或多個輸入類型(IO, Fieldbus),從遠端控制手臂。
手臂防自夾偵測 #
- 啟用防自夾偵測功能,則系統就開始使用 3D 模型進行計算,與碰撞檢查節點的相同規則。用戶可以設定整數檢測距離以毫米為單位,作為機器人連桿與法蘭之間的安全距離。
運動設定 #
- 進行安全輸入功能相關的運動設定,設定項目如下:
- 速度抑制: 此功能常態開啟。Point、Circle、Pallet、Move、F-Point、Touch Stop (Line)、Vision (Fixed Point)、Vision Node (Servoing)、Path等節點的的運行速度會根據使用者於安全性設定頁中設定的安全工具速度與軸速度上限自動調整。
- 減速時間: 當機器人進入協作空間,會在特定時間內啟用速度設定。
教導相關功能 #
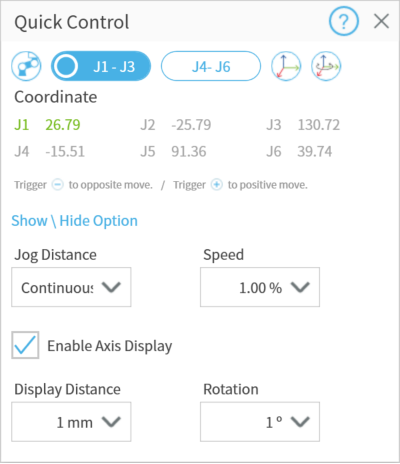
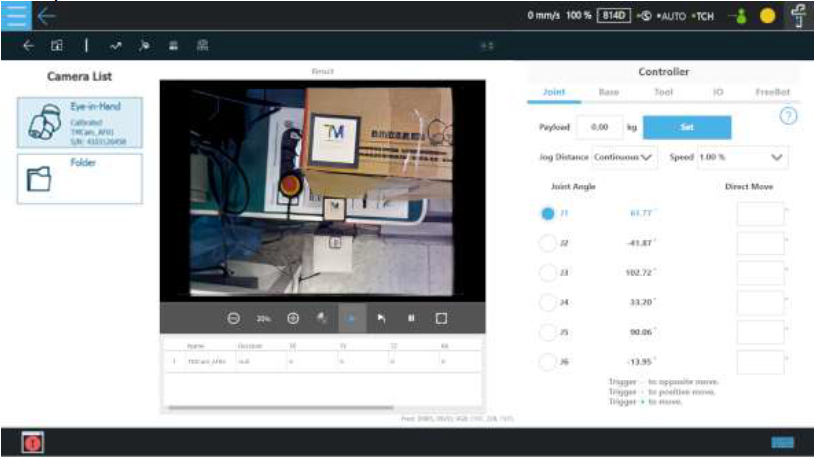
Quick Control #
- 不需要額外的連線或設定,即可使用機器人控制棒移動機器人。.
- 於Quick Control浮動視窗:
- Control Type鈕可選擇Joint/Base/Tool模式
- DoF鈕選擇可切換軸向
- Freebot鎖定鈕可鎖定軸向
- 啟用軸顯示可顯示運動控制方向
搖桿控制 #
- 自動識別搖桿,類似於滑鼠或鍵盤等設備。
- 支援 XInput 搖桿設備。
- 可用一個搖桿控制多部機器人(一次只能操作一部機器人)。

FreeBot阻尼模式切換 #
- 使FreeBot手拉教導時更容易,在長距離移動時更加順暢,或是在精確移動時加重手感。
- 增加移動模式單選鈕:
- Accurate: 重而精確
- Normal: 介於精確與迅速之間
- Fast: 手感輕如先前版本
TM 編程相關功能 #
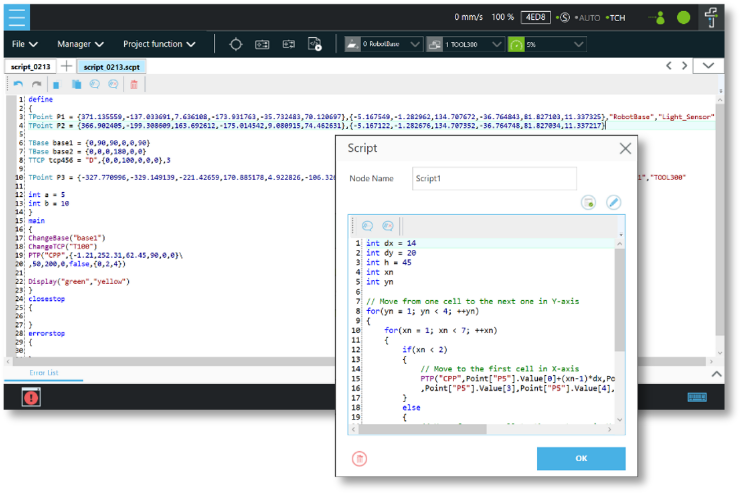
Script 節點 & Script 專案 #
- 如果您喜歡非圖形化編程,可以嘗試使用新的Script節點和Script專案來體驗更靈活的編程方式。Script允許有經驗的工程師通過編譯代碼來編輯機器人任務。選擇最適合您的方法,享受更大的自由進行編碼。
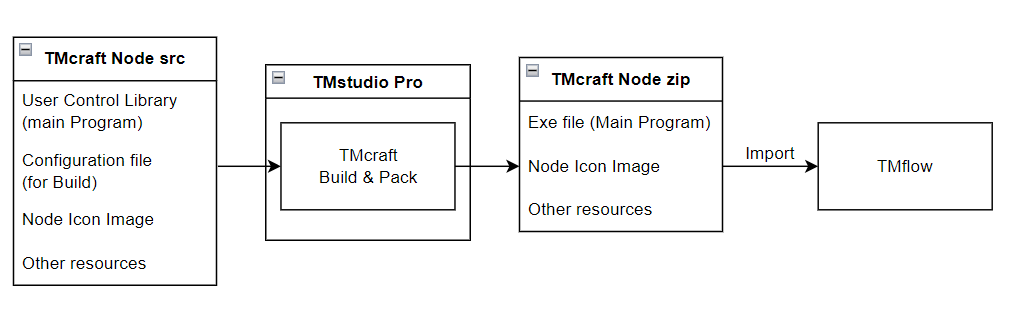
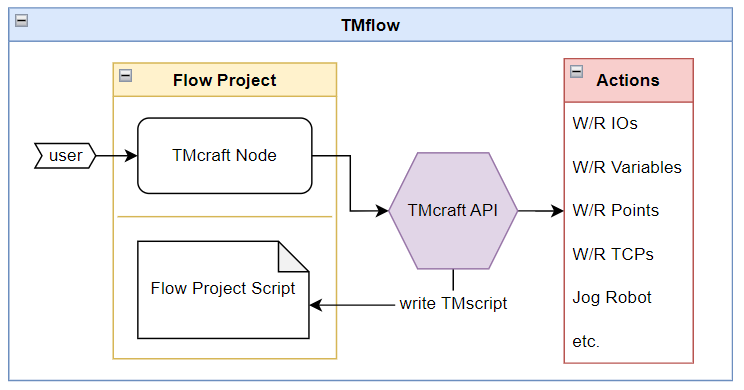
TMcraft 節點 #
- TMcraft是一個新的架構,允許您創建自己定制的用戶界面(UI)或背景程序,並將其嵌入到TMflow中。它提供了C#和WPF來開發第三方即插即用應用程序的自由。此外還提供了一個工具精靈,以便開發高級應用程序,如焊接、棧垛和砂磨等,使得自定義和創建所需的應用程序變得更加容易。
- 客製化節點程式部屬至機器人端前皆須於TMstudio Pro建置包裝。
- 客製化節點介面以TMcraft API與TMflow互動,如:建立或修改變數、設定TCP、吋動機器人等。使用者於此節點介面完成設定,節點程式將設定值編寫成TMscript(於專案運行時執行),最後透過TMcraft API寫入至Flow Project。

TMcraft Service #
- 以額外程式設計方式,於TMflow可在手動/自動模式下執行TMcraft service。
- 開放使用者以 C# 或 C++ 開發客製化執行檔於TMcraftPacker封裝。
- 有GUID機制,避免名稱衝突。
- 執行檔限定不可關機、讀寫C槽與D槽特定路徑。
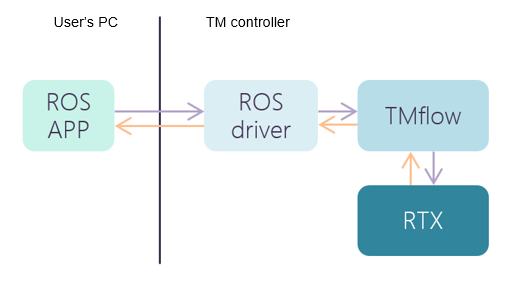
嵌入 Foxy 版本的ROS Drivers #
- TM ROS Driver 允許開發者在 ROS 架構下操作機器人,並獲取重要資訊,如機器人狀態、EIH 影像等,以創建出色的應用程式。
- 同時還提供相關資源,例如示例程式、用於調試的圖形使用者介面(GUI)工具,以及在 Gazebo 或 Moveit 上進行模擬所需的資源檔案 (URDF)。
使用者定義節點預設設定範本 #
- 在Point節點、F-Point節點和Move節點中提供自定義範本。該專案將記錄範本資料。例如F-Point 節點 中的 FineTureValue 和 MoveNode 中的 MovingSetting以及其他所有參數均在清單中。
使用其他專案的流程 #
- 新增頁面時,使用者可從選擇增加頁面的類型(Select Add Page Type)點選透過其它專案增加頁面(Add page from another project),以檢查和匯入其他專案的頁面。
註解備註 #
- 使用者可在註解(Comment)上的工具列增加、編輯、或刪除註解。
自定義I/O名稱 #
- 自訂您自己的輸入/輸出名稱以便更容易區分。
TMvision相關功能 #
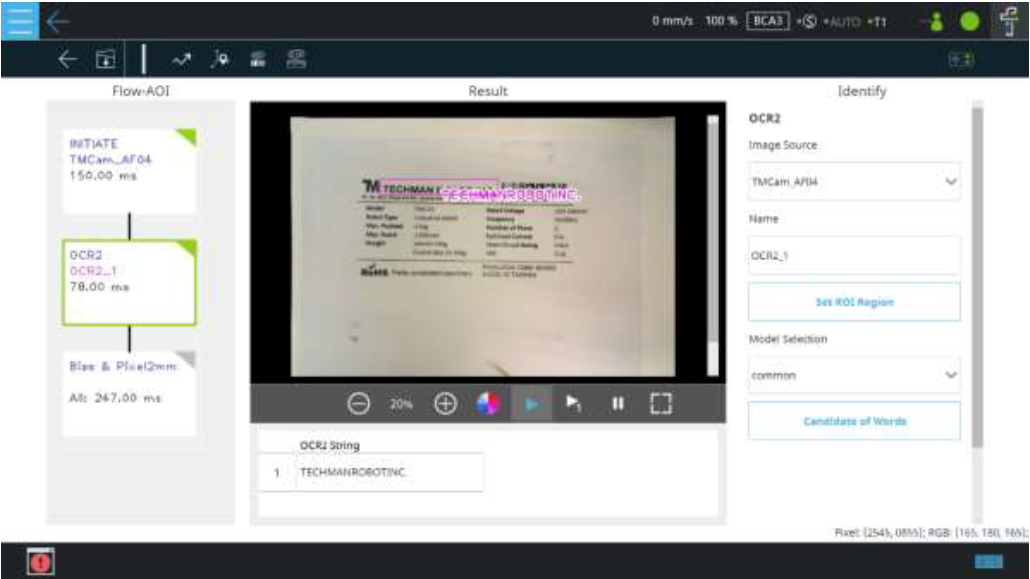
OCR2 #
- OCR2模組可以識別檢測到的圖像中的字符。
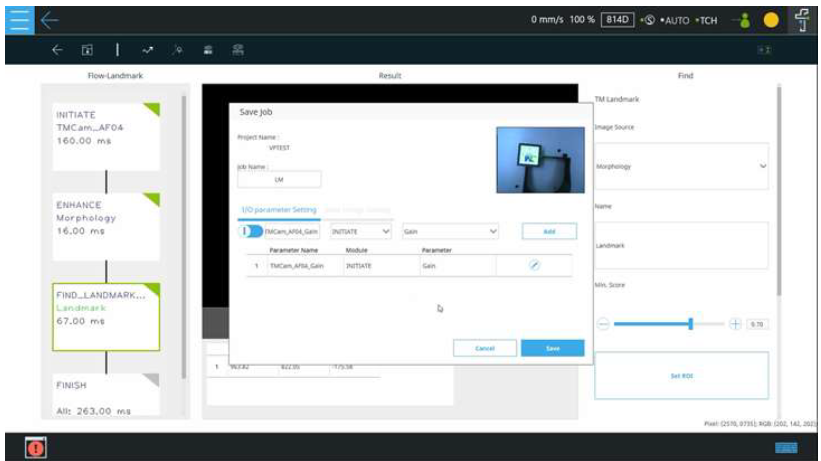
TMvision 參數化 #
- 儲存視覺任務時可選擇參數化的輸入或輸出參數。
- 可讓使用者於進入視覺節點前更新視覺參數,視覺任務會以此更新參數執行,而無需編輯視覺作業。
TMvision 多個 Landmark篩選 #
- 當即時影像中出現多個Landmark時,使用者可以利用感興趣區域(ROI)功能篩選出需要的
自訂Landmark尺寸 #
- 使用者可依自身需求在Landmark定位任務中自訂Landmark的尺寸(㎜)。
- 自行訂製的TM Landmark長寬尺寸,係指黑色方框的內部長寬尺寸。
共享相機影像 #
- 使用相機前次影像(Use last image of the camera)的選項打勾後,系統採用相機最後一次拍攝之影像,作為當前視覺任務影像來源。共享影像的功能限定AOI應用模組才可使用。
Landmark任務閥值設定 #
- 移動滑桿設定閥值。閥值標記顯示於即時影像中TM Landmark字串旁。
- 使用Precise Detection,額外花費 30~50 毫秒,更精確地檢測TM Landmark。
影像補正 #
- 利用物體的幾何輪廓特徵來建立該物體的樣板模型,再透過該樣板模型於輸入影像上比對,藉以找出該物體在影像上之位置,再將整個輸入影像進行平移與旋轉,使此樣板模型置於面正中心。
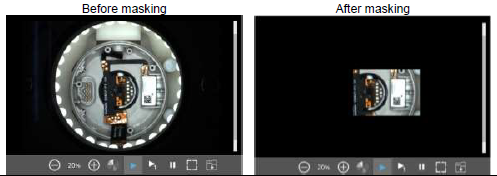
影像遮罩 #
- 濾除圖像中與任務無關的區域,使後續辨識、檢測任務處理上有更少的雜訊。
TM AI+ 相關功能 #
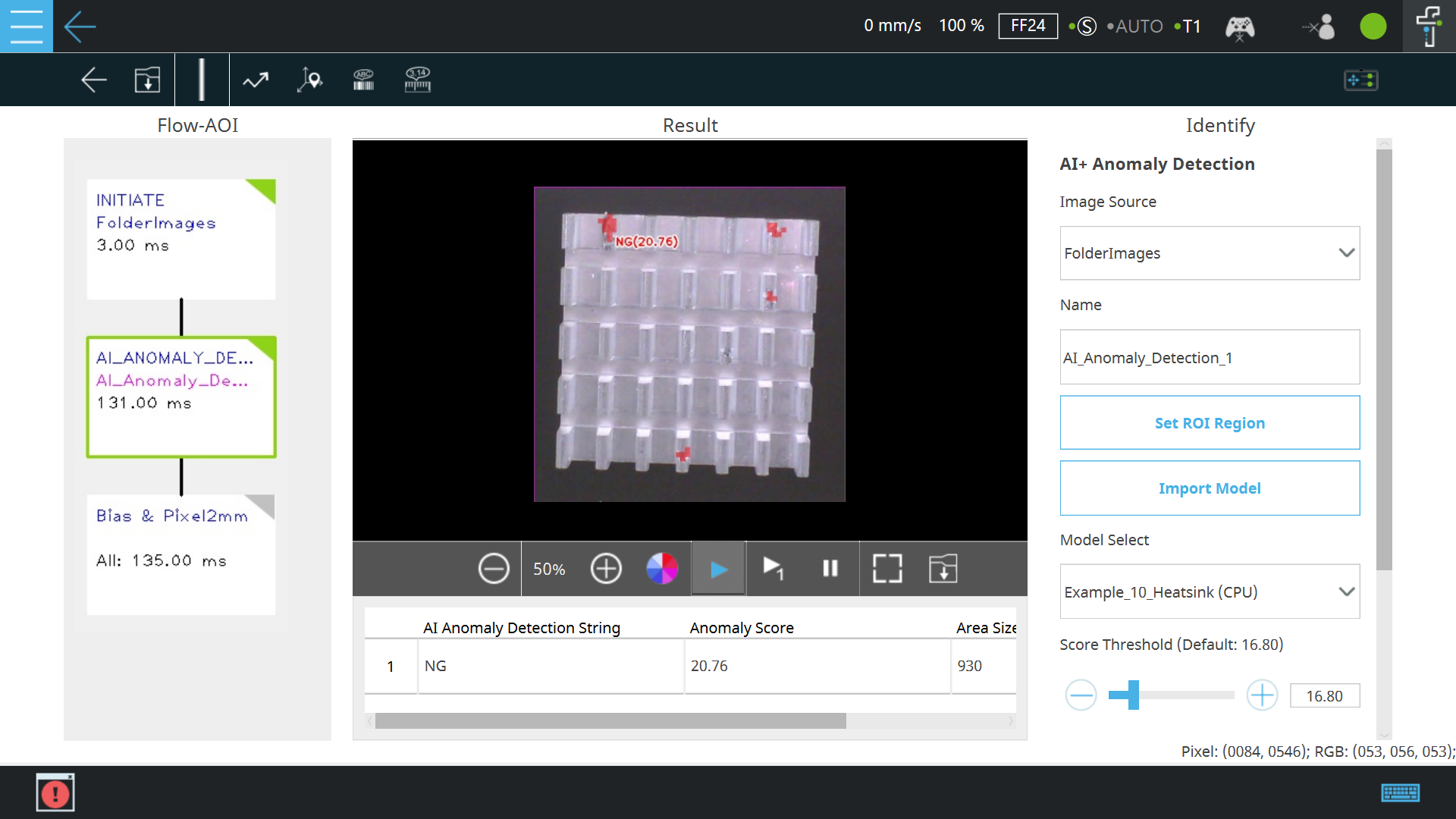
異常偵測 #
- 透過TM AI + Training Server的AI模型進行圖像的OK/ NG分類。
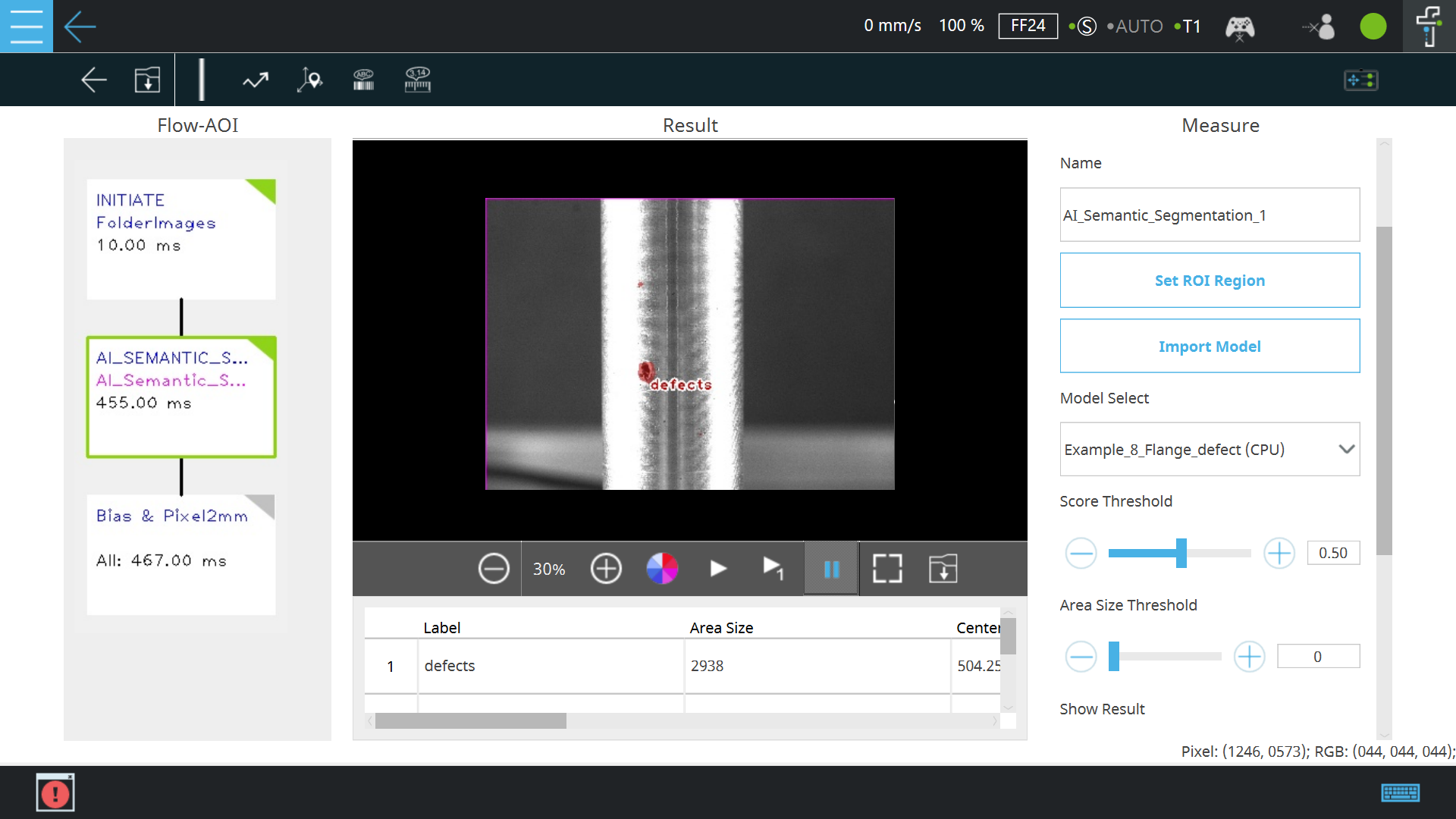
TM AI+語義分割 #
- 用於高精度圖像識別等需要描述目標邊界之應用。藉此,缺陷檢測可以正確描述不規則形狀與尺寸之缺陷。
新增GPU 運算功能 #
- 在TMflow AI function或TMflow AI+ AOI Edge AI function選擇運算裝置加速GPU的推論執行時間。使用者需安裝對應GPU版本的GPU patch,才可以使用GPU。
- TM AI+ Training Server 2.0的模型才能執行GPU推論。
傳送附標籤影像 #
- AI+ Classification、AI+ Detection、AI+ Anomaly Detection中的TM AI+ Setting頁面中,新增Dataset Label,並有兩個選項:uncertain及Predicted。
- Uncertain:在TMvision傳送Image到Training Server的Dataset時,若有經過Model Inference,則Image為Labeled且Label Name 為 uncertain
- Predicted:在TMvision傳送Image到Training Server的Dataset時,若有經過Model Inference,則Image為Labeled且Label Name 為Model Inference 的 Predicted String。
更多功能 #
預覽、紀錄專案運行速度 #
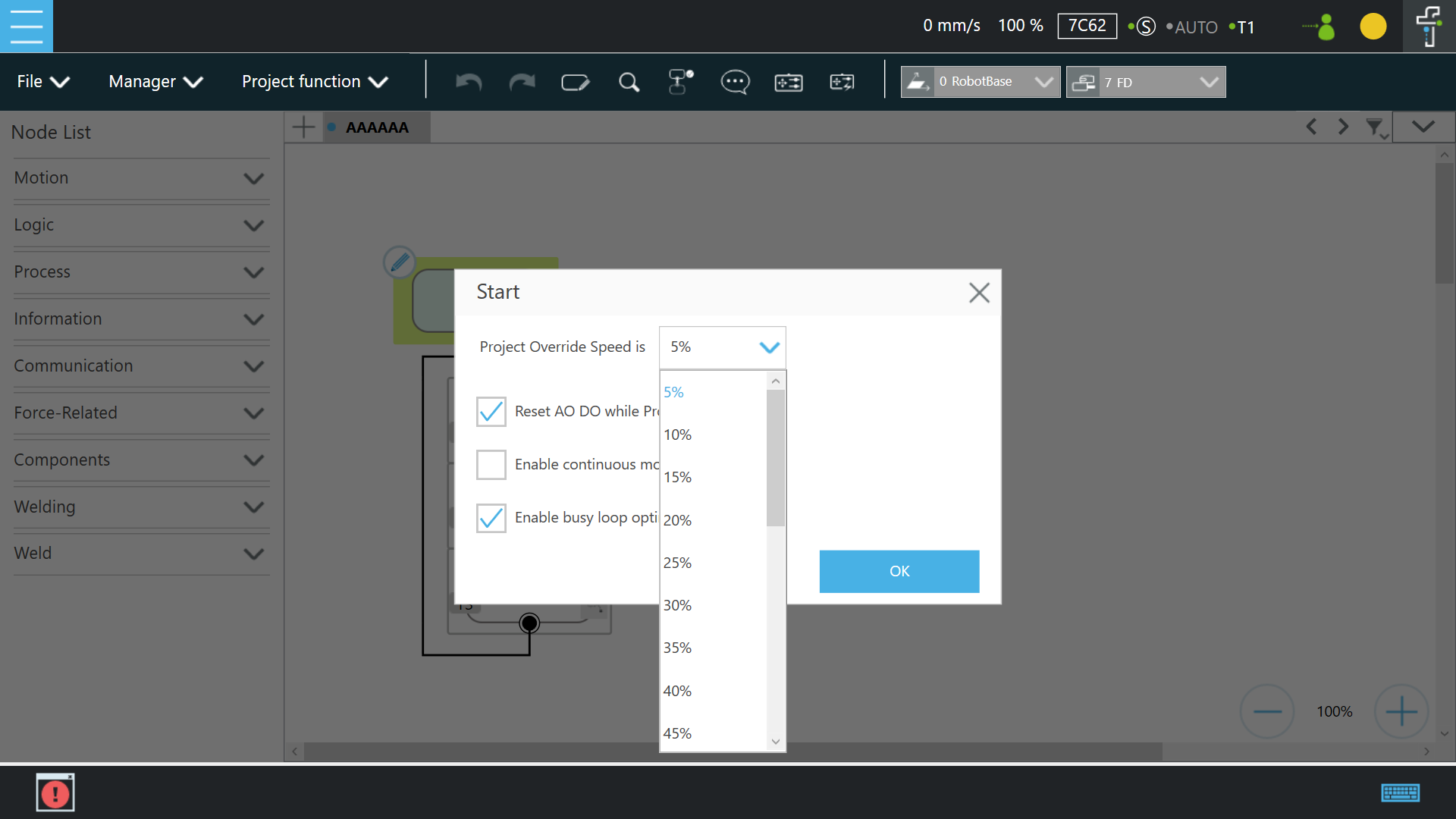
- 在Start節點設定專案運行速度(Project Override Speed)。可讓使用者於執行專案之前再次紀錄、修改所需的專案速度。
- 專案運行速度預設為5%,並以每5%的增加幅度加速到100%。
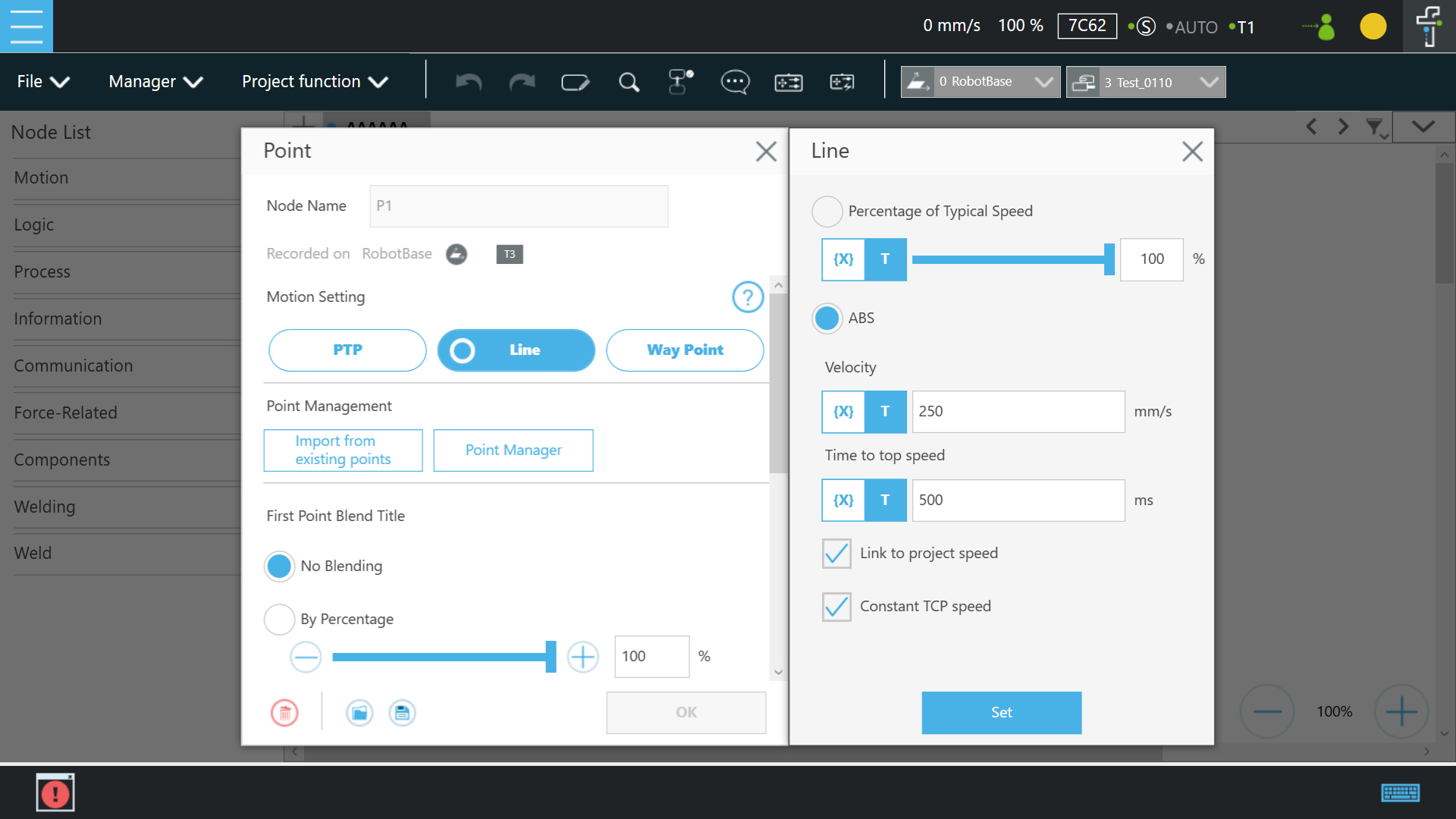
確保TCP速度保持恆定 #
- 選擇絕對速度(ABS)後,使用者可將恆定TCP速度(Constant TCP speed)的選項打勾,以確保TCP保持恆定速度,但降低關節的速度保護。若未勾選,ABS速度可能會變慢,因旋轉保護無法跟上直線速度。
- 用於節點(Point、F-Point、Pallet、Move、與Path)的Line運動模式。
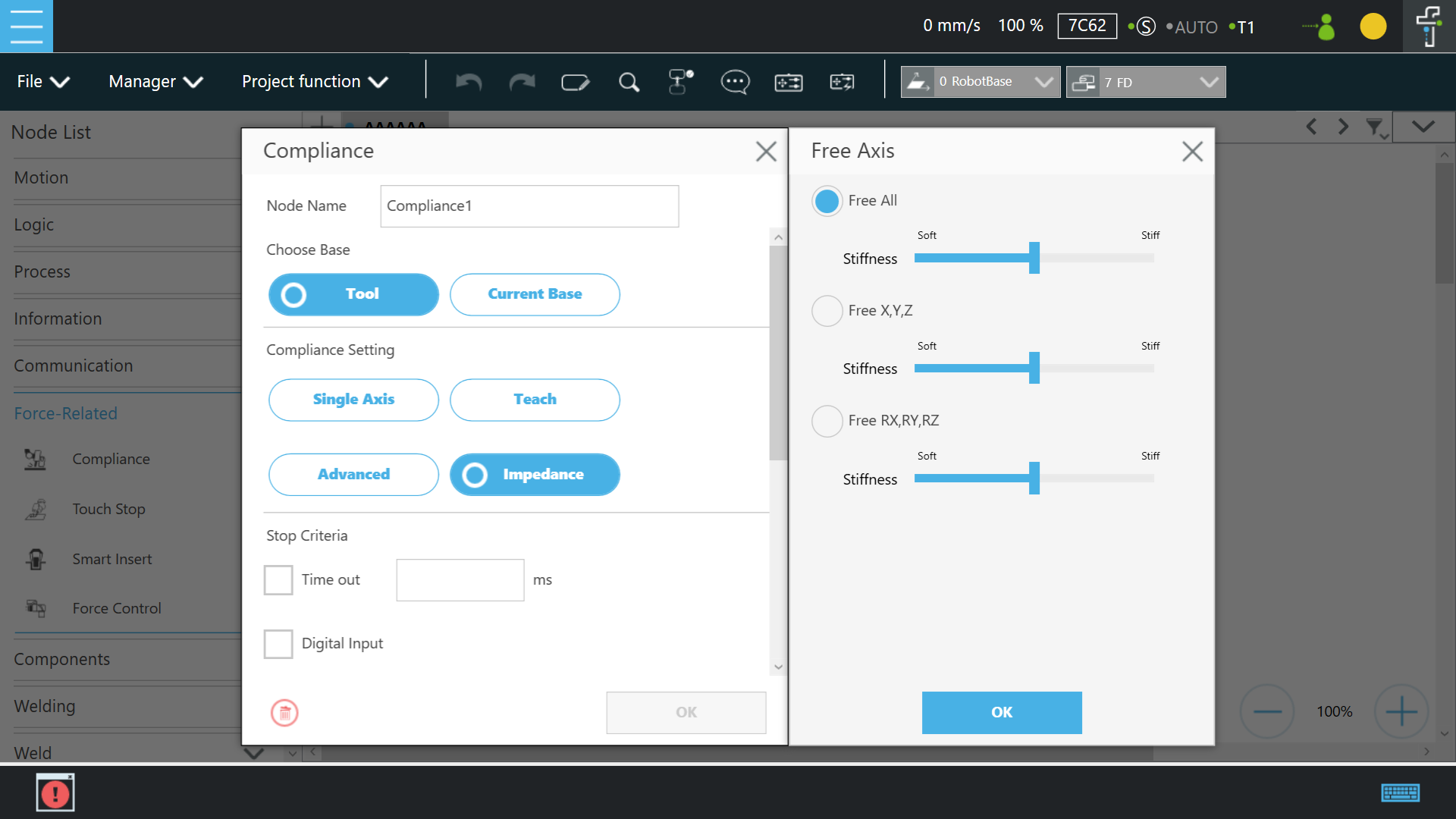
阻抗控制 #
- 進入設定後,提供三種方向限制:Free All、Free X,Y,Z、Free RX,RY,RZ,三種方向限制各自有不同強度可調整。越強表示剛性越硬,機器人越難推動。
專案操控速度與專案鎖設定權限 #
- 新增Change Project Override Speed與Project權限之子權限Project Lock Setting。
- 具Change Project Override Speed權限之帳號才可於Start Node設定專案操控速度,於AUTO Mode以機器人控制棒調整儲存專案運行速度。若無此權限則僅能檢視不能修改。
- 具Project Lock Setting權限之帳號才可點開Project/Project Function/Project Lock後使用Project Lock Setting之設定功能,否則只能使用Editable Nodes List功能。
專案鎖設定 #
- 專案鎖僅能由具專案鎖設定權限之帳號編輯設定。
- 專案鎖設定具備一個總開關,其enable狀態代表專案鎖起動,專案結構不能更動(即Node/subflow/thread新增、刪除,改變節點連接),除了被設定為可編輯項目以外。
- 可編輯節點清單有排序功能,共三種方式:節點名稱依字母順序排列、依字母倒序排列、節點種類。此外,專案鎖以可指定專案是否具使用管理員與專案功能。
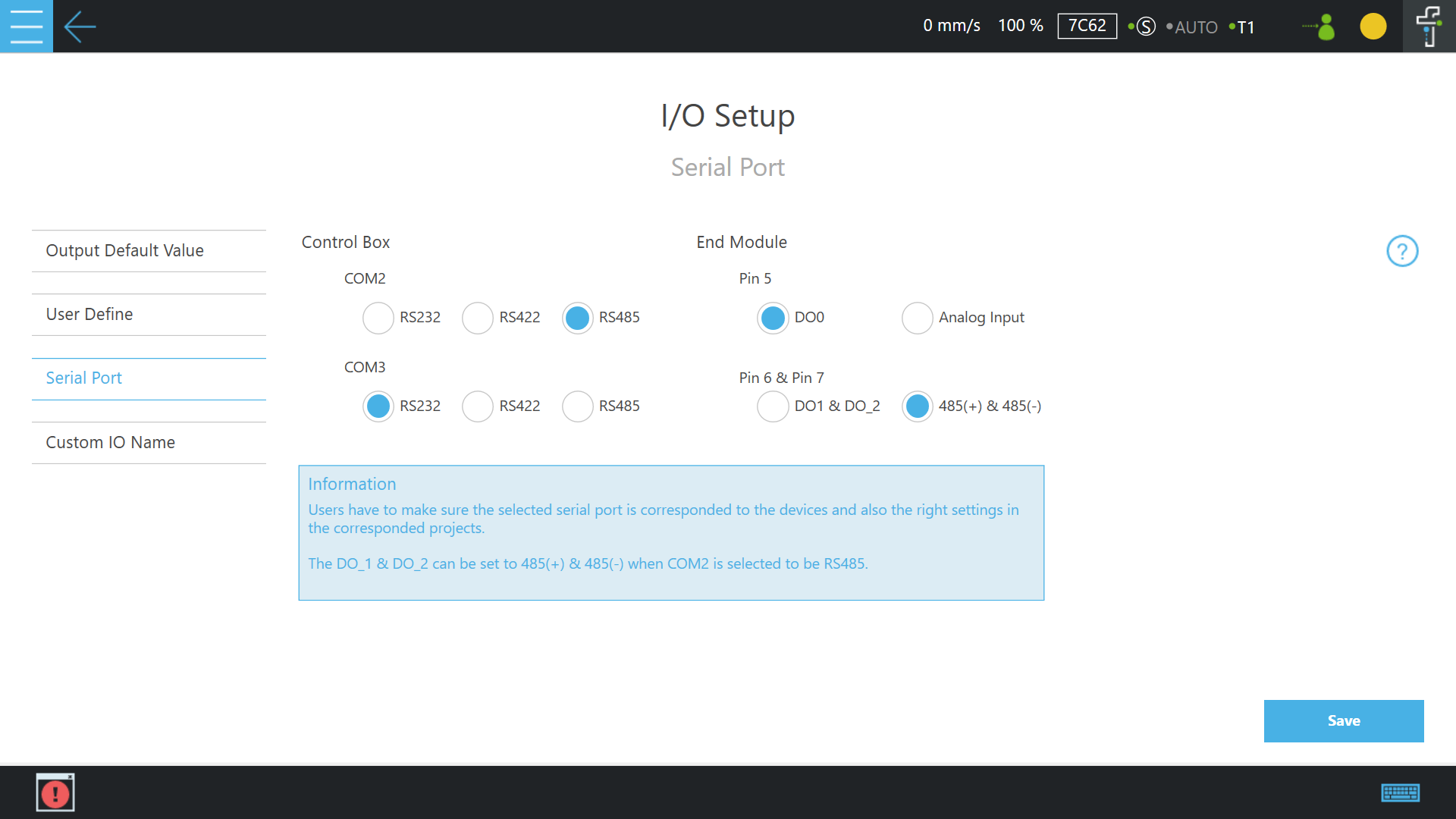
可配置的序列埠 #
- 不需使用轉換器即可設定序列埠介面模式為RS-232、RS-422、或RS-485。
- 設定手臂末端IO模組。可於螢幕顯示針腳定義圖。
機器人設定轉移至另一部機器人 #
- 使用者可將機器人內檔案與設定匯出至隨身碟,快速複製到另一部機器人。
- 使用者可將舊版本設定轉移到新版本的另一部機器人。
- 符合機器人同版本、電控箱同世代、目標TMflow軟體版本大於或等於來源版本,才可順利轉移。
單電腦TMflow 2 支援與相容性 #
- 可在一台筆電或桌機上安裝多個版本之TMflow。
- 讓使用者於連接不同版本之TMflow機器人時切換到目標版本TMflow。
- 可相容子版本。
TMflow 2 相容於HW3.2 #
- TMflow 2系列與2的使用者相容,並可進行升級。
- 將您的機器人系統與最新的軟體功能同步、更新、與整合,體驗最新的軟體功能。讓前一代和S系列間沒有任何差距。


