此文章之範例適用於下列條件:
TMflow 軟體版本: 1.76.6300 或以上。
TM 手臂硬體版本:所有版本皆適用。
請注意,新舊版本之差異可能導致操作介面、步驟上會有所差異。

1.接近(Approaching)
- 最大移動距離可以多一點,彌補物件在工具座標Z軸的偏移
2.搜索(Searching)
- 頻率,調到最慢
- 搜索半徑,調到最小, 再慢慢加大
3.插件(Inserting)
- 接觸力,由小調到大
- 速度,由小調到大
- 移動距離,由小調到大
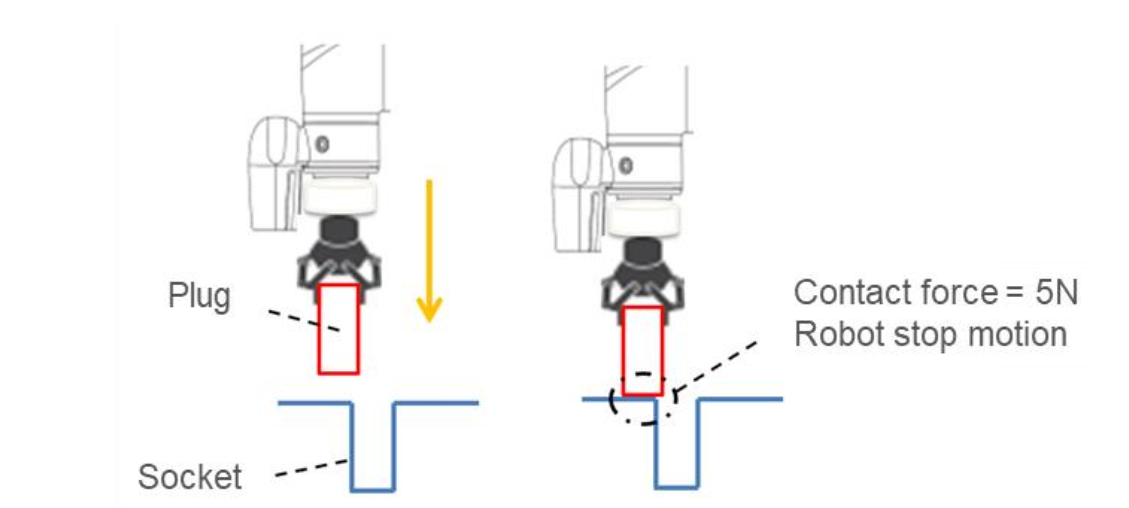
在使用 Smart Insert 節點之前,使用者應盡可能將待插入件接近組裝位置。在接近
( Approaching)步驟中,機器人會往工具座標的 z 軸方向前進,直到力量感測器偵測到 5 牛頓( N)的抵抗力。
| 重要: 因為接觸力需要達到 5 牛頓, 接近( Approaching) 步驟才會結束,使用者需要確認插入件與 待插入件至少須能承受 5 牛頓的力量,以免破壞產品。 |
接近參數設定 #
在 Smart Insert 節點的接近( Approaching)提供三個設定參數:
- 接近速度 Approaching Speed: 範圍為 0.5-10mm/s
- 最大移動距離 Moving Distance Limit: 範圍為 1-100mm
- 逾時 Time Out: 。可設定在 1-20 秒之間
請注意, Smart Insert 節點的接近( Approaching)方向為工具座標的 Z 軸向

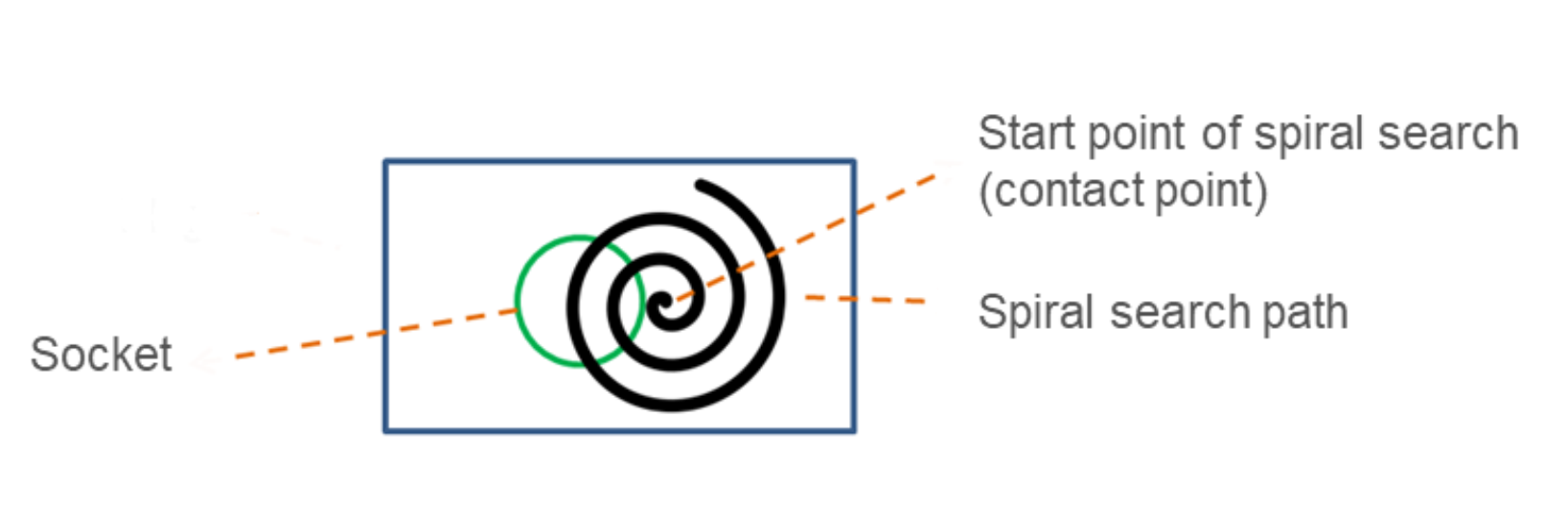
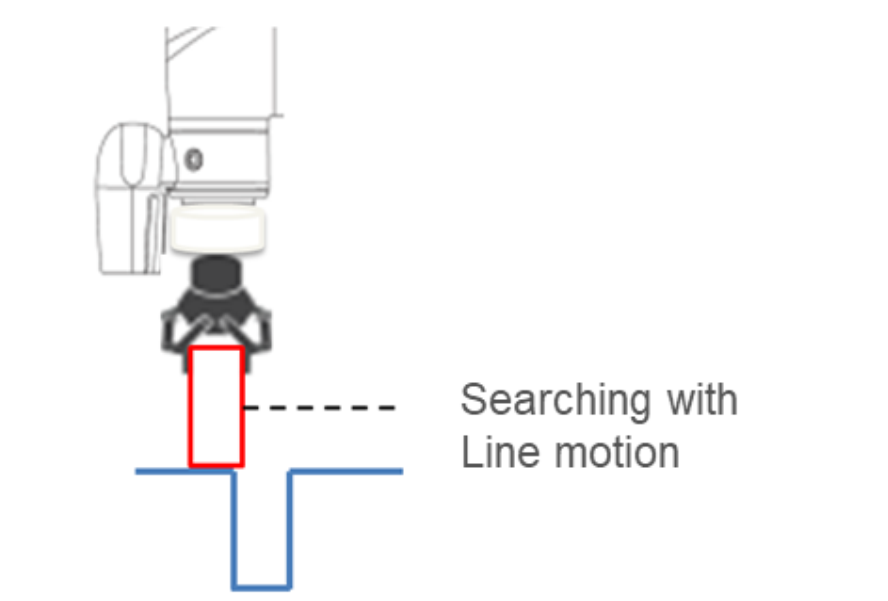
結束接近( Approaching) 步驟後,即進入搜尋( Searching)階段。搜尋( Searching)可分為螺旋( Spiral)與直線( Line)兩種策略。下圖為螺旋( Spiral)策略的運動方式,該搜尋策略會以接近( Approaching) 的接觸點作為圓心,即插入物與待插入物的接觸停止點,以螺旋的運動方式向外搜尋,直到滿足停止條件。使用者如果選擇直線( Line)的方式搜尋, 機器人會依循使用者設定的搜尋軸向,進行直線搜尋,直到停止條件被滿足,如圖所示。無論是螺旋( Spiral)還是直線( Line)搜尋方式,在搜尋的過程中, 機器人會在 Tool Z 的軸向以接觸力施加向下的固定力。
在搜尋( Searching)的停止條件可以分為" 完成搜尋"與" 停止搜尋",其中停止搜尋亦即判定在搜尋條件內,找不到插入點,如搜尋時間過久、搜尋距離過長等;反之,如果插入件進入了插入點後, X-Y 平面的合力大於 5 牛頓( N),且Z軸接觸力為零,則判定為完成搜尋,並進入最後插入( Inserting)階段。

當 XY 的碰撞合力大於 5 牛頓, 則判定為完成搜尋。
搜尋參數設定: 螺旋 #
在螺旋( Spiral)搜索中,需要設定搜索半徑( Searching Radius)、繞圈頻率或切向速度( Circling Frequency or Tengential Speed)、 允許最大高度變化( Height Tolerance)與逾時( Time Out)。 下表針對各設定條件作定義解釋。

請注意,在螺旋的搜索過程中, 機器人可能會走出待插入件的邊界,於是誤判為找到插入點。於是,設定允許最大高度變化,即可避免誤判的發生。
一般而言,如果插入物的幾何形狀為圓形,如定位銷,建議使用螺旋( Spiral)的搜尋方式;若插入物的幾何形狀為矩形,如 SD RAM,建議設定搜尋方式為直線( Linear)。

搜尋參數設定: 直線 #
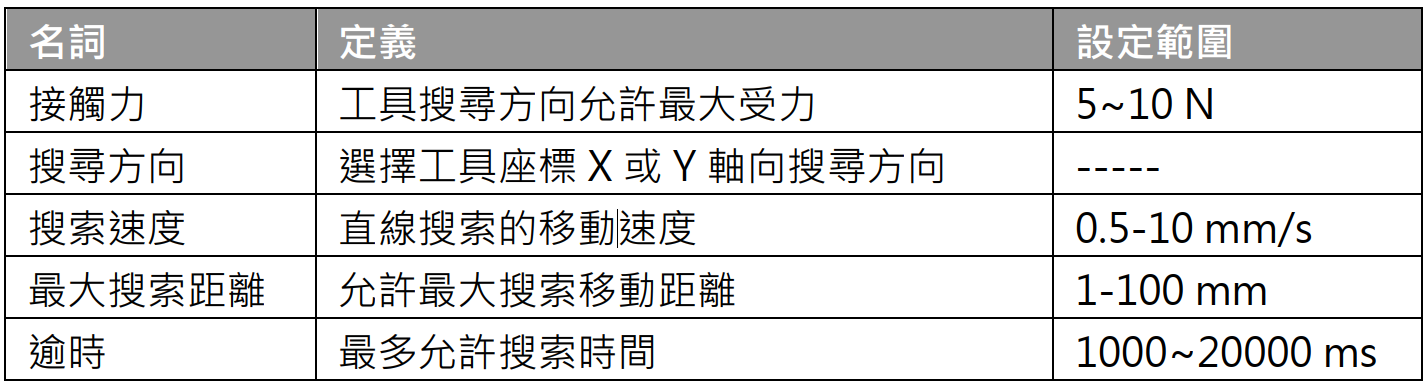
直線的搜索設定,其參數設定介面,如下圖所示。與螺旋搜索不同的是,直線搜索能夠設定工具座標 Z 軸的接觸力( Contact Force)大小,以及直線搜索方向( Searching Direction)。直線搜索參數定義如下表所示。
插件 #
當完成搜索( Searching)步驟後,插件件已對準插件點。在插件( Pushing)的過程中, 機器人會往Z軸方向移動,直到達到停止條件,如偵測到Z軸接觸力或滿足插件的行程距離。若 X、Y、 RX、 RY 與 RZ 偵測到外部力量抵抗, Smart Insert 節點會自動柔順式往碰撞的反方向移動,以避免插件過程產生碰撞干涉。
插件參數設定
插件的參數設定與直線搜尋相似。使用者可以設定插件過程的接觸力( Contact Force)、插件速度( Pushing Speed)、允許最大移動距離( Moving Distance Limit)與逾時( Time Out)。
其各參數定義與設定如下表所示。




