Table of Contents
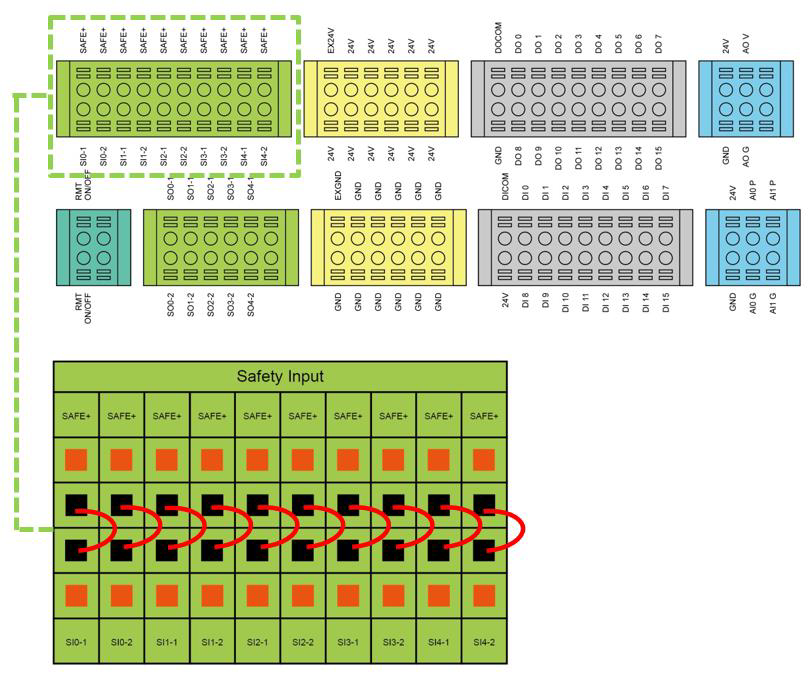
Safety I/O comes with a dual redundant channel connector and has to keep both channel input/output the same value simultaneously. Single fault on either one of the single-channel will not result in failure of safety functions.
Safety Input Connector #
User Connected:
- ESTOP Input Port is an N.C. contact (Normally closed). When User Connected ESTOP Input Port is OPEN, the robot enters the Emergency STOP state.
- External Safeguard Input Port is an N.C. contact (Normally closed). When User Connected External Safeguard Input Port is OPEN, the robot enters the Protective Stop state.
- External Safeguard Input Port for Human-Machine Safety Settings is an N.C. contact (Normally closed). When User Connected External Safeguard Input Port for Human-Machine Safety Settings is OPEN, the robot decrease the limits to which is set in Human-Machine Safety Settings
- Enabling Device Input Port is an N.C. contact (Normally closed). When User Connected Enabling Device Input Port is OPEN in Manual mode, the robot is unable to present manual control operation. When User Connected Enabling Device Input Port is CLOSED in Manual mode, the robot is able to present manual control operation.
- ESTOP Input Port without Robot ESTOP Output functions as the User Connected ESTOP Input Port above, but it does not trigger the function of Robot ESTOP output.
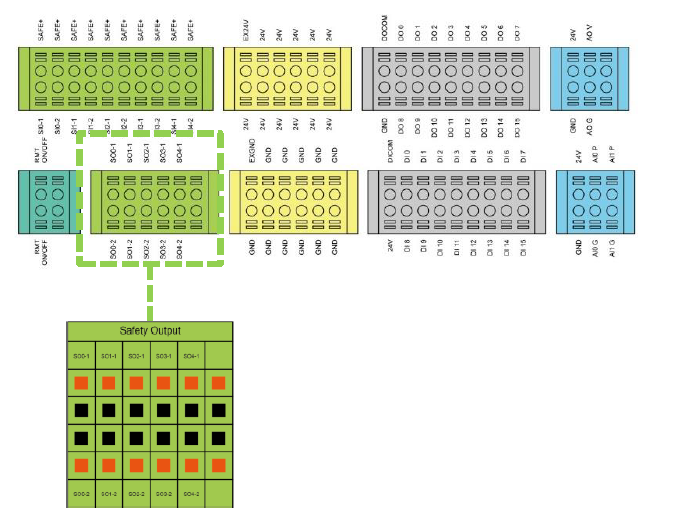
Safety Output Connector #
- Robot ESTOP Output Port. When the robot triggers the Robot (stick) Emergency Stop signal, the output will be LOW.
- User Connected External Safeguard Output Port. When the robot triggers the User Connected External Safeguard Input, the output will be LOW.
- User Connected External Safeguard Output Port for Human-Machine Safety Settings. When the robot triggers the User Connected External Safeguard Input for Human-Machine Safety Settings, the output will be LOW.
- Robot Internal Protective Stop Output Port. When the robot triggers the internal Protective Stop, the output will be LOW.
- Robot Encoder Standstill Output Port. When the Encoder Standstill is not monitoring (robot is moving), the output will be LOW.
DANGER:
- Do not connect the safety signals to a non-safety device without the fulfilled safety level. Failure to do so may result in injury or death due to a malfunction of the safety stop.
- All safety I/Os come with dual redundant channel connectors. Maintain both redundant channels while pairing and connecting to make sure that a single fault on either one of the single-channel will not result in failure of safety functions.
- Before putting to use the robot, be sure to check the safety functions and schedule to check the safety functions on a regular basis.


