Examples are valid for:
TMflow Software version: 1.76.6300 or above.
TM Robot Hardware version: All versions.
Other specific requirements: All versions.
Note that older or newer software versions may have different results.
If the robot has been stored (or has not moved) for a long period of time or in cold environments, let the robot joints rotate slowly before main operation. It could raise the temperature inside the reducer, soften and recirculate the grease, and make lubrication more even. Then, the robot is able to achieve its maximum performance.
Therefore, we recommend these steps:
- Install the robot in a room-temperature environment without any payload or tool.
- Power on the robot and transition it from the packing pose to the normal pose.
- Create a project that generates a set of points representing all possible positions where the robot’s joints can rotate, and create a loop iterate through these points.
The steps are below :
- Open TMflow and create a new project.
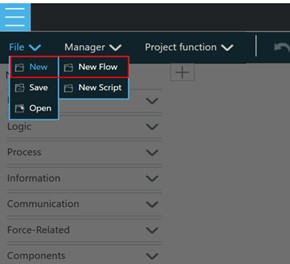
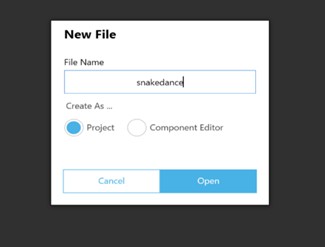
- Type the project name and click the “Open” button.
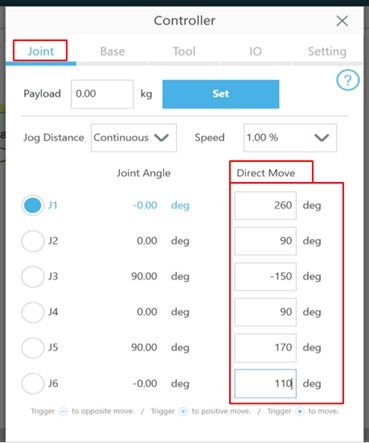
3. Select Controller. 
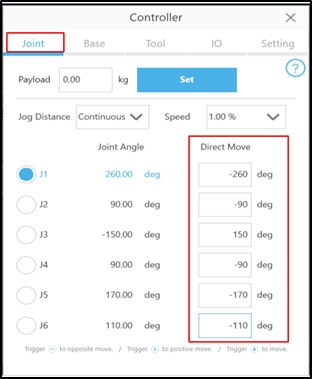
4. In the controller, choose “Joint” –> Direct move –> enter the degrees for the joint positions as shown in the picture below –> then press play until the robot joints have reached the desired positions.
J1 = 260 deg
J2 = 90 deg
J3 = -150 deg
J4 = 90 deg
J5 = 170 deg
J6 = 110 deg
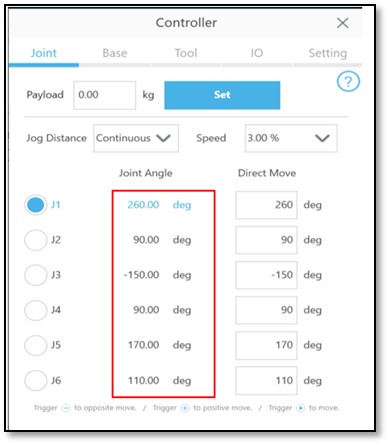
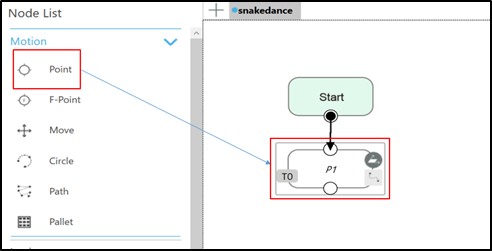
5. Close the controller and drag a point node to record the robot’s position (Point 1).
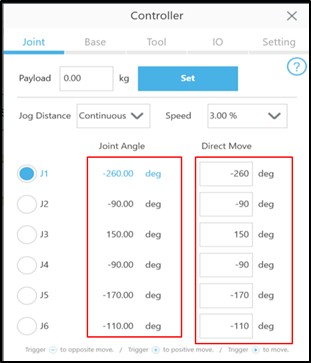
6. Select controller again –> Joint –> Direct Move–> enter the degrees for the joint positions as shown in the picture below –> then press play until the robot joints have reached the desired positions.
J1 = -260 deg
J2 = -90 deg
J3 = 150 deg
J4 = -90 deg
J5 = -170 deg
J6 = -110 deg
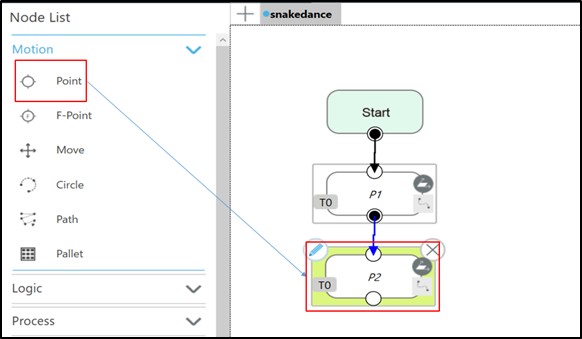
7. Close the controller and drag a point node to record the robot’s position (Point 2).
8. Drag a loop node for the project to be able to run continuously.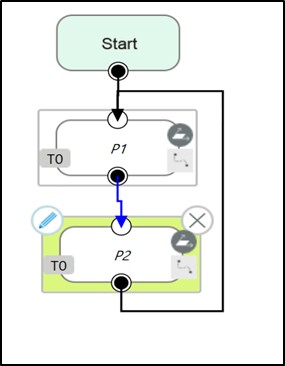
9. Start playing the project with an initial speed of 10%. If no safety alarms occur, gradually increase speed to 30%.
10. Keep the project running for at least 20 minutes.


