Table of Contents
此文章之範例適用於下列條件: TMflow 軟體版本: 1.76.6300 或以上。 TM 手臂硬體版本:所有版本皆適用。 請注意,新舊版本之差異可能導致操作介面、步驟上會有所差異。
Modbus #
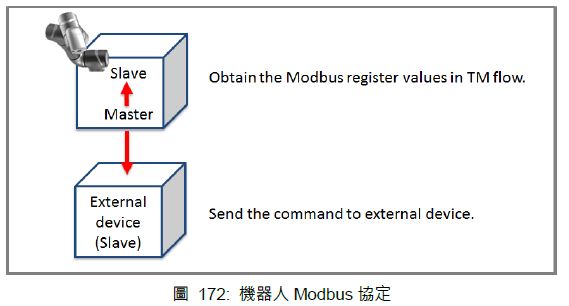
Modbus 是一種主/從式通訊協定(Master/Slave),使用者可利用Modbus Master 的指令讀取或寫入機器人存放於暫存器中的參數,如位置、姿態、IO狀態等。使用者可利用取得的參數進行專案的編成或機器人的狀態監控。TM機器人提供Modbus TCP和Modbus RTU兩種通訊協定,並可同時存在Master以及Slave的角色,使用者可取得外部Modbus裝置或機器人暫存器中的的資料。也可以利用外部裝置如IPC、PLC等設備擔任Master發送指令給TM 機器人取得相關資料。
Modbus系統軟/硬體架構 #
軟體 : #
-
設定Modbus TCP #
在TMflow的設定頁面,點選Connection進入Modbus Slave頁面,使用者須確認在有取得IP的狀態下,才能夠啟用Modbus TCP功能。IP過濾器可設定網路遮罩,須在設定的網域下才可以與手臂進行通訊。使用說明書硬體安裝使用手冊。
-
設定Modbus RTU #
在Modbus Slave的RTU設定頁面,此介面設定參數需與外部裝置同步方可使用,確認設定的參數無誤後,即可開啟Modbus RTU透過序列埠讓手臂與不同設備之間進行通訊。
硬體 : #
Modbus區分為Modbus TCP和Modbus RTU兩種通訊協定,Modbus TCP使用RJ45進行通訊,在電控箱的位置僅有一處可以使用RJ45進行Modbus TCP的通訊;Modbus RTU使用序列埠進行通訊,以上接線位置與方法詳見使用說明書硬體安裝使用手冊。


