Table of Contents
此文章之範例適用於下列條件: TMflow 軟體版本: 1.76.6300 或以上。 TM 手臂硬體版本:所有版本皆適用。 請注意,新舊版本之差異可能導致操作介面、步驟上會有所差異。
Compliance使用方式 #
Compliance節點可設定機器人沿單一座標系上移動時的力量限制,此設定可用於碰撞測試、物件裝配、物件搜索等多種應用。使用者可根據工具或當前座標系決定機器人運動的方向。
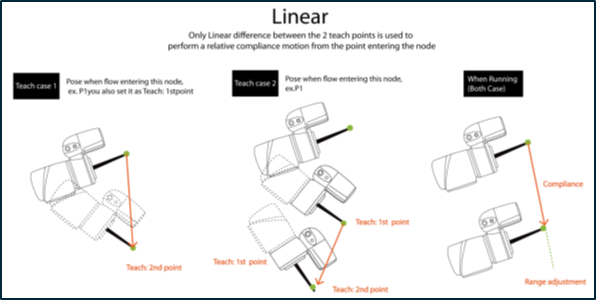
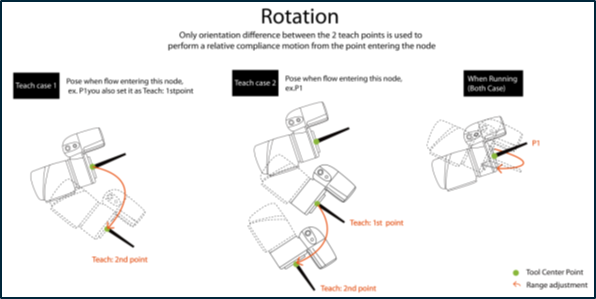
Compliance節點的運動設定可區分為單軸以及教導兩種,單軸部分可參考本節的範例說明;教導部分Compliance節點可選擇直線方向或旋轉方向進行教導,使用者可根據教導的兩點,進行相對之移動以完成組裝、碰撞等任務,設定完相關的參數後,使用者即可在運動模式下可以指定該運動的速度以及其他附加停止條件,確保不會造成工具損壞。在Compliance模式中,安全設定仍發揮作用。
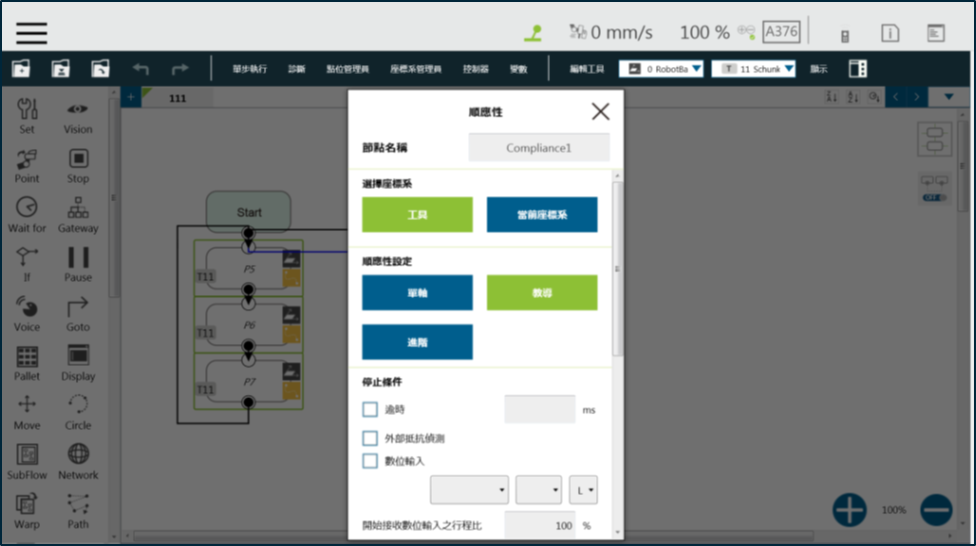
Compliance使用方式–單軸 #
- 選擇座標系:依工具或當前座標系進行移動
- 順應性設定:選擇單軸以定義方向(軸),距離,目標力/扭矩,順應速度,教導使用手動示教方法,或進階為compliance適用方向定義力/扭矩、距離限制、與目標速度。
停止條件設定 :
- 逾時:完成任務前或執行任務期間到達設定時間,則會跳脫此節點
- 外部抵抗偵測:感受到抵抗力後使得手臂末端速度接近0,跳脫此節點
- 數位輸入:設定一個數位輸入訊號,滿足時跳脫此節點
- 開始接收數位輸入之行程比:適用於單軸與教導。當單軸上的移動距離超過相對百分比時,DI檢測開始生效。若檢測到DI,則輸出帶有IO觸發(4)的變數。否則,出現Error(6)。
- 變數:設定開始接收數位輸入之行程比之接收變數。變數可用於顯示Compliance的結果,意味著哪些條件首先觸發,且應具有以下可能性:
- –
- Timeout
- Distance Reach
- Digital Input (or Analog Input) triggered after the Stroke %
- Resisted
- ERROR (including TCP speed over limit, incorrect timing of DI triggered, and etc.)

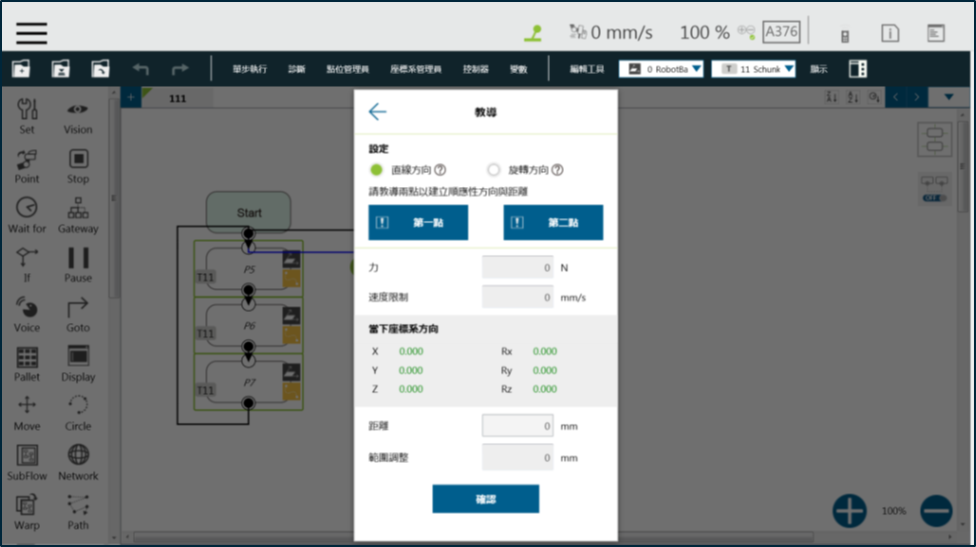
Compliance使用方式–教導 #
- 設定: 依直線方向或旋轉方向進行教導
- 教導點: 設定兩點並計算方向與距離,此兩點並非記錄實際之點位,移動方式為與Move節點類似之相對移動。
- 範圍調整: 提供使用者在原有方向直接調整距離或角度而不需要重新教點
針對任何可能發生的情況,使用者可根據Compliance節點回傳的變數結果與與協調IF節點預先編程解決方案。



