Table of Contents
此文章之範例適用於下列條件:
TMflow 軟體版本:所有版本皆適用。
TM 手臂硬體版本:所有版本皆適用。
請注意,新舊版本之差異可能導致操作介面、步驟上會有所差異。
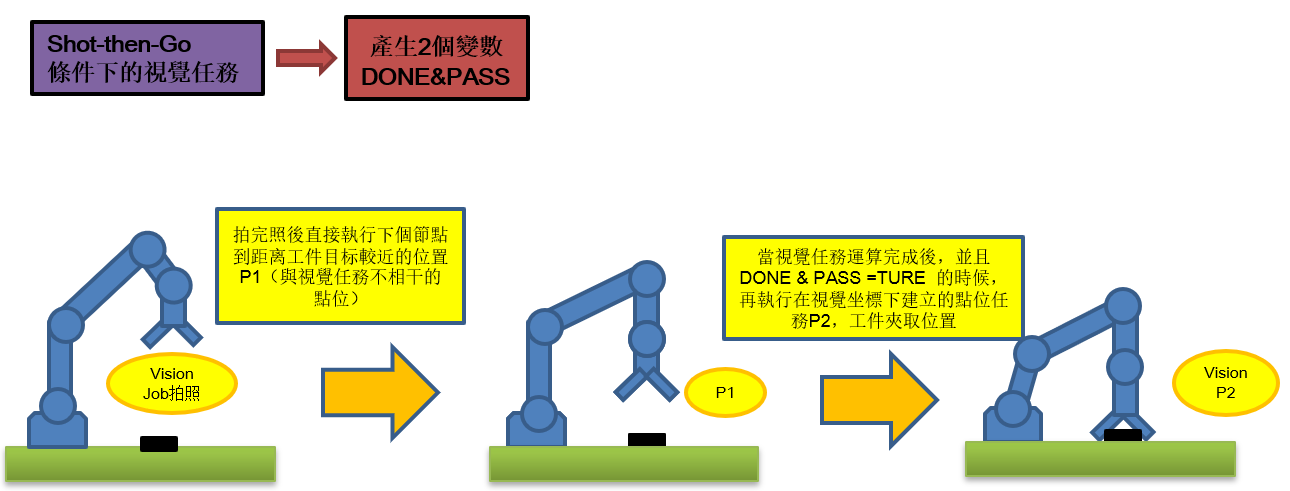
Shot then Go #
目前僅支援定點式定位以及部分AOI功能
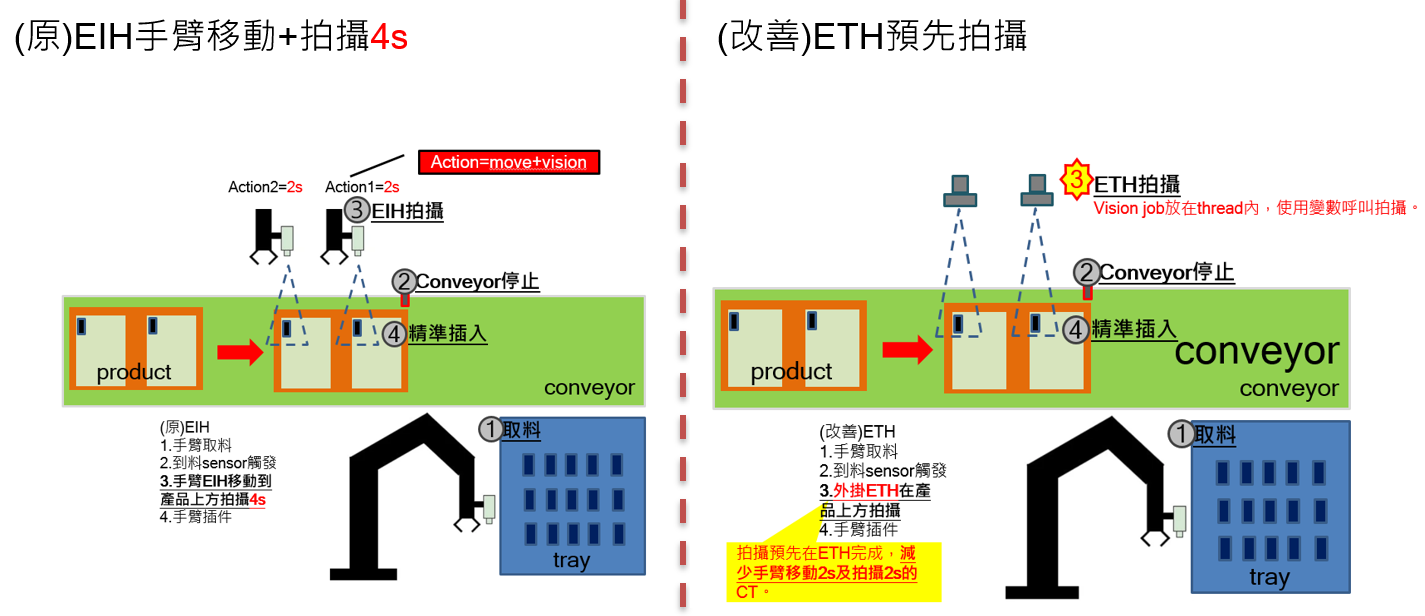
Shot then Go可以讓手臂在拍完視覺任務的影像後,直接進入下一個節點,直到視覺任務成功完成運算後,才會回來執行視覺坐標系下的任務,從而節省視覺任務拍照後的等待時間。
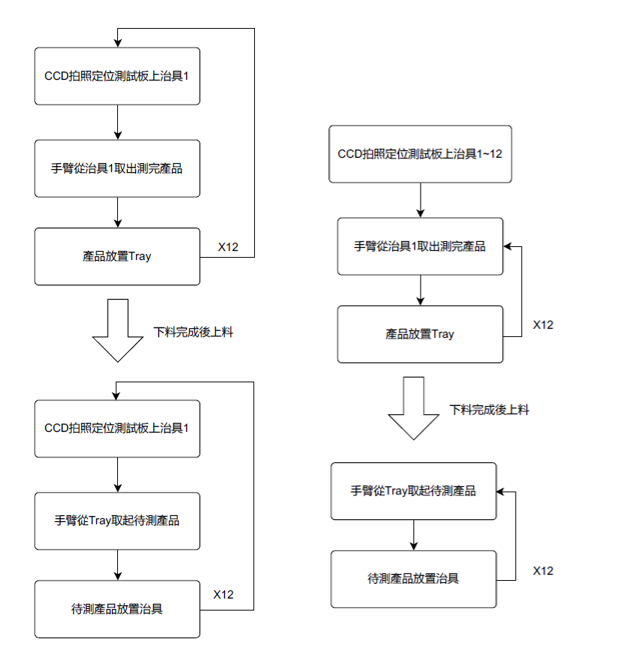
儲存視覺坐標系以減少拍照次數 #
情境:多個相同治具需要來回上料與下料,如下圖流程所示。
透過儲存治具1~12的視覺座標系搭配參數化,動作流程優化如下圖流程所示
其他小技巧 #
- 採用灰階色彩平面
- 設定ROI,減少程式判斷範圍
- 使用適合的金字塔層數


