Table of Contents
此文章之範例適用於下列條件:
TMflow 軟體版本: 1.76.6300 或以上。
TM 手臂硬體版本:所有版本皆適用。
請注意,新舊版本之差異可能導致操作介面、步驟上會有所差異。
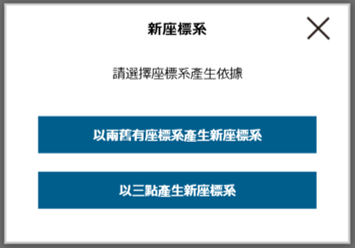
產生new base兩種做法 #
- 以兩舊有座標系 產生新座標系
- 以三點 產生新座標系
以兩舊有座標 產生新座標系 #
原理:以兩座標間的中心點產生新座標(如右上圖)
- 優點:便於大物件的對角定位建座標系
- 缺點:以該座標移動教點時,是斜著走,並不直覺,若更換視覺定位特徵,新座標上的點位需要更改
注意事項:
- 請確保兩視覺座標同平面,距離誤差才不會算錯 (以robot base移動並不一定保證與工作平面水平)


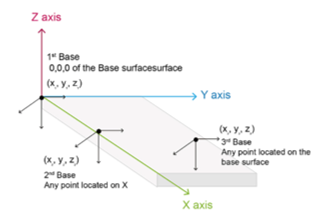
三點產生新座標系 #
原理:以三個點位建立座標
教導的三點分別為
- 原點
- X軸上的點
- XY平面上的點
優點 : 座標系方向較直覺

上述兩種作法結合 #
- 情境:當物件視覺定位點變更,需要更換視覺定位特徵時
- 第一次就先以「兩視覺座標建立新座標系」,再以該新座標系上,建立三點新座標
- 優點:視覺定位特徵若有變動,只需更新三點newbase的三個點位即可,建於三點新座標系的點位無須再重教,大幅縮短調整時間。


