TMflow 軟體版本: 所有版本皆適用。
TM 手臂硬體版本:所有版本皆適用。
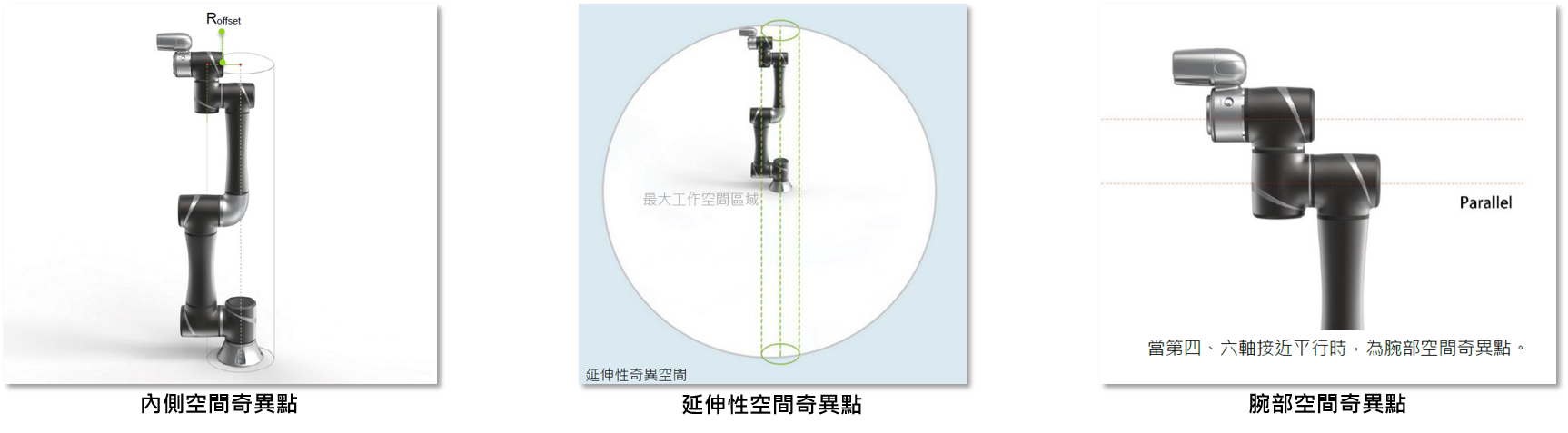
手臂的TCP無法達到手臂規格範圍外的空間以及奇異點;TM Robot的奇異點分為下述三種:內側空間奇異點、延伸性空間奇異點及腕部空間奇異點,當TCP Point運行至奇異點時,手臂將停止動作並啟動警告(關於奇異點,詳見「Safety Manual System 奇異點」)。若手臂運行路徑可能經過奇異點時,Motion Node設定應選擇PTP,由程式內部自動迴避該區域。如果出現無法排除的狀況,請聯絡合格授權的服務人員。