需求原因 #
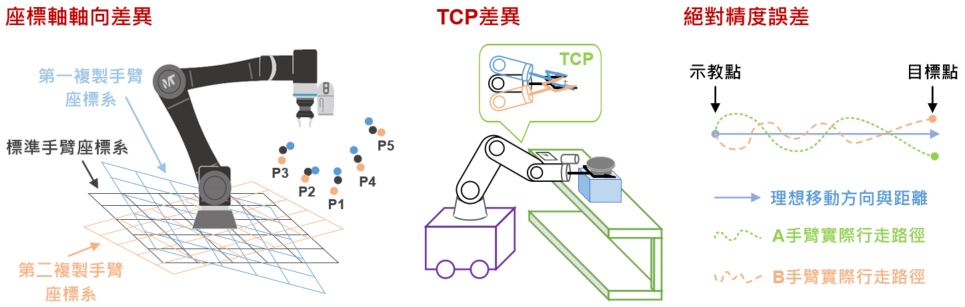
每隻手臂因為絕對精度誤差、手臂座標軸軸向差異以及TCP差異這些機差來源,使得標準手臂的專案匯入到複製手臂且直接執行時,點位實際行走到的位置與目標位置會有所偏移。
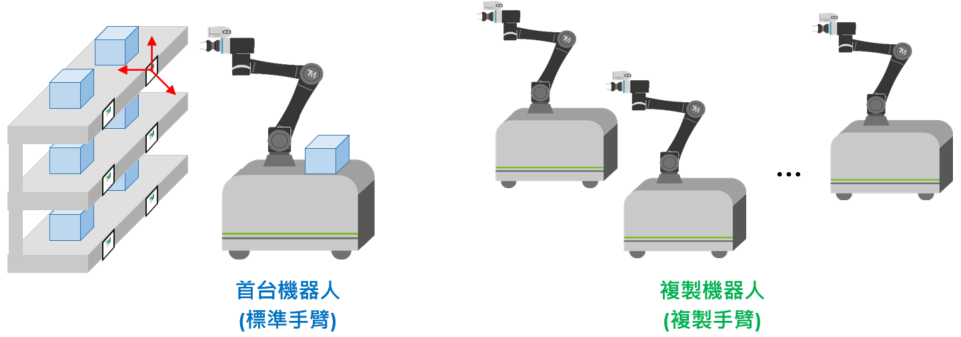
當標準手臂發生碰撞而需要更換手臂,或有手臂複製線需求如AMR車隊,傳統做法是對每隻手臂進行調機。試想一下,當有100隻手臂需要在100台設備上執行相同專案,此時先花了T小時調整點位,接續將還需要T*99小時才能完成所有手臂的調整。
由此可知,傳統的做法將花費大量的時間跟人力,而機差校正即是用來降低複製線所需的調機時間與人力。
簡介 #
在建立專案時,利用Landmark視覺定位將點位建立在視覺座標系上,即可解決座標系軸向差異。
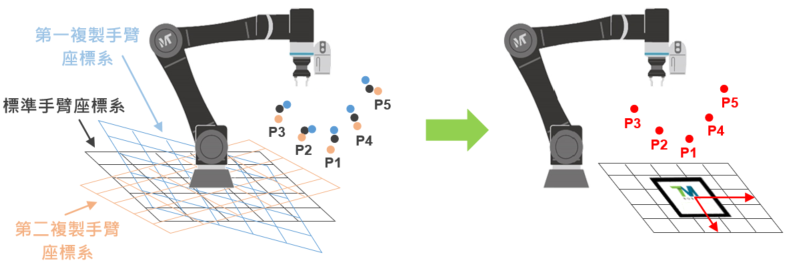
其餘機差來源,則透過選擇一個標準手臂專案的視覺點位作為校正點,複製手臂重新調整該點並記錄成一個新點,再根據新舊兩點計算點位差異,並將其補償至複製手臂的TCP,而所有套用該TCP的點位也會同時進行相同補償。

使用限制 #
點位修正限制 #
修正TCP只可用於與校正點有相同姿態的點位。
精度與可修正範圍 #
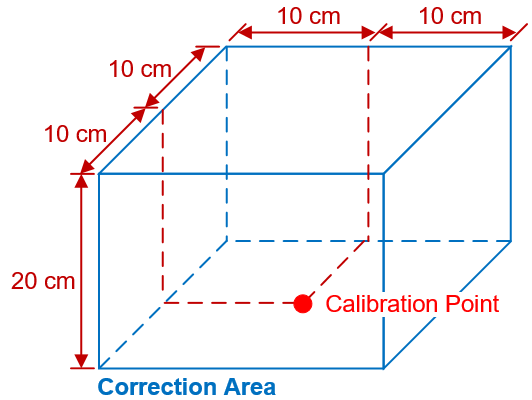
根據量測結果,在下述條件下可預期點位修正後誤差小於1 mm: 點位在校正點上方20公分以內,且以校正點為中心X、Y方向 ±10公分以內。
但須特別留意點位修正誤差仍然取決於校正手法與校正點校正精度,若此點誤差過大,可修正到1 mm的範圍將縮減。
AMR場景應用實例 #
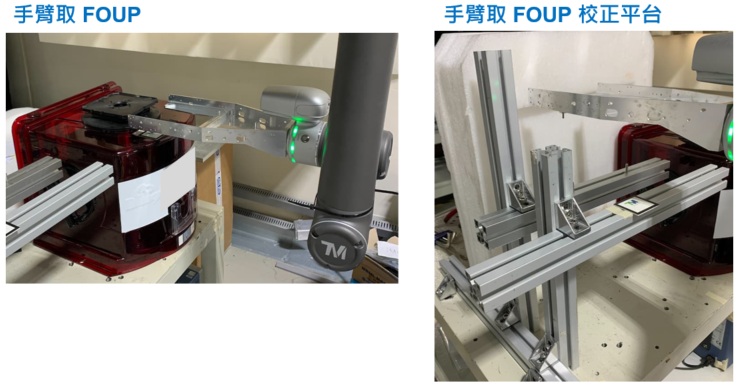
此處以AMR應用中的提取前開式晶圓傳送盒(FOUP)為例,將使用兩隻手臂說明如何進行機差校正。
[此步驟可省略]
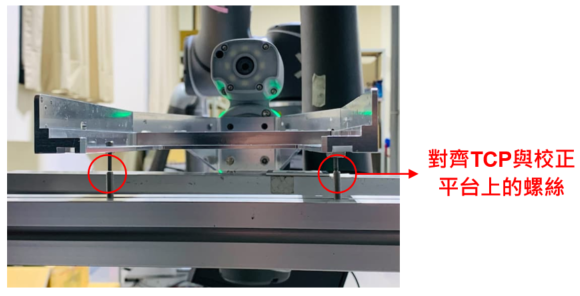
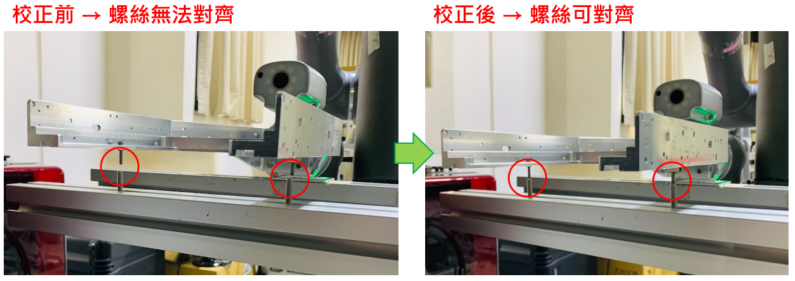
為了更直覺的觀察校正前後差異,在此於TCP上安裝兩根螺絲,並於外部架設校正平台,亦在平台上安裝兩根螺絲,將透過對齊兩組螺絲來進行機差校正。

所需設備 #
兩隻型號相同的手臂
一個 FOUP
一個提取 FOUP的TCP
一個 landmark
[以下設備如無需求可忽略]
可放置在工作平台的支架或底板
一個 landmark
兩個螺絲(放支架/底板上)
兩個螺絲(固定TCP上)
備註:
- 為了減少人眼校準誤差,可把螺絲替換成校準針,並盡量設計定位孔進行鎖附。
- 盡量使用兩根以上的校準針進行校正,一根僅能校正點位而無姿態。
- 校正環境盡量與實際工作場景相近。
標準手臂 #
以首台編輯專案的手臂作為標準手臂。先在工作區域編輯專案,再移至校正區調整校正平台。
設定 TCP #
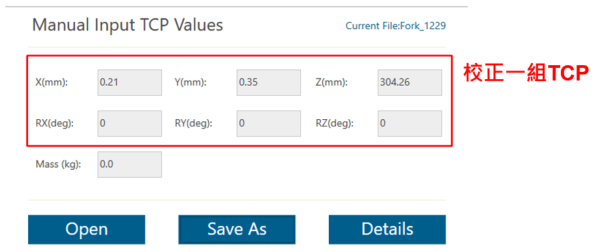
在編輯專案前,至設定 > TCP設定校正一組TCP。
專案編輯 #
編程步驟:
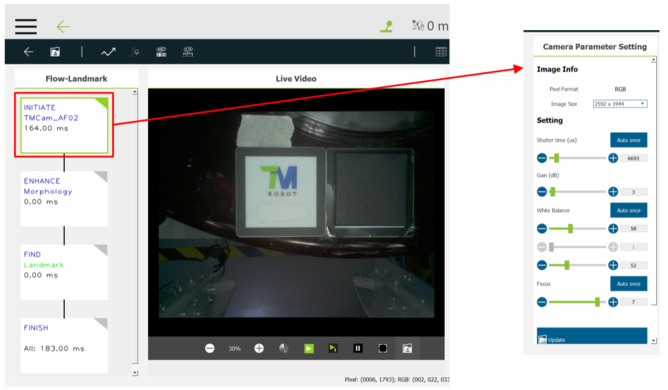
- 先編輯兩個Landmark定位任務,第一個為遠看用以尋找Landmark;第二個為近看用以定位識別Landmark。
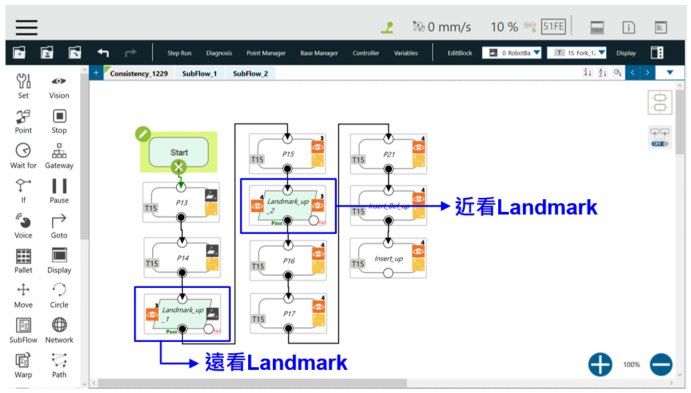
- 在第二個Landmark定位中,須注意以下幾點:
- 因視覺定位本身也有定位精度,因此建議相機與Landmark的距離介於10~15公分。

- 在儲存視覺任務前,注意Landmark四個角的分數要大於0.8。
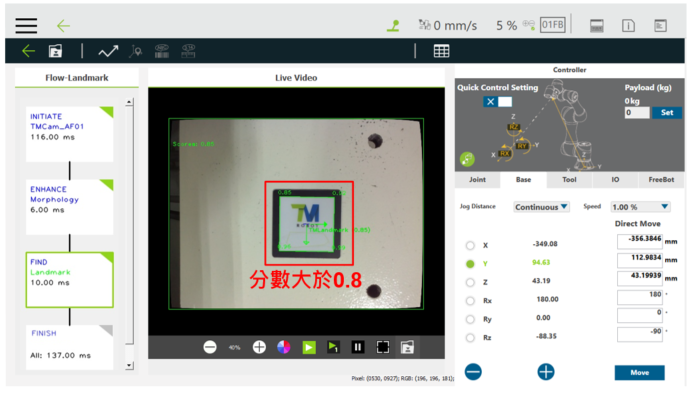
若分數太低或變動幅度太大,建議調整相機觀看距離或角度與回到流程編輯頁面重新調整相機參數。
- 因視覺定位本身也有定位精度,因此建議相機與Landmark的距離介於10~15公分。
- 編輯工作點位 (特殊的點位記得改名)

調整校正平台 [可省略] #
手臂TCP裝上螺絲並移至校正區,固定好校正區的Landmark並再一次觀測後,選擇專案中一點作為校正點並移至該點,此處選用取FOUP的點位作為校正點;接著調整校正平台上螺絲的位置,使其對齊TCP的螺絲。
備用或複製手臂 #
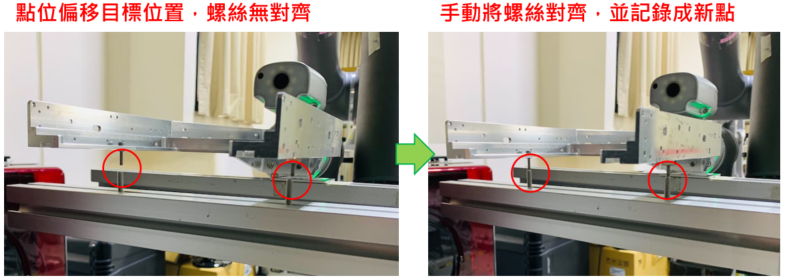
匯入標準手臂的專案與TCP,先在校正區直接執行專案,會發現點位發生偏移。依循下述步驟進行機差校正:
- 引導手臂至校正點,手動重新調整至正確位置,並記錄成一新點位。
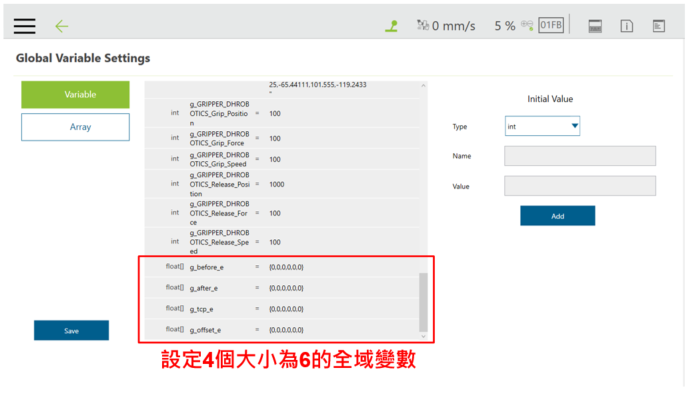
- 在全域變數設定中新增4組float陣列,大小皆為6。兩組為記錄校正點調整前後的座標值(這兩個也可以設定為區域變數);一組為記錄點位差異;一組為記錄TCP轉換後數值。
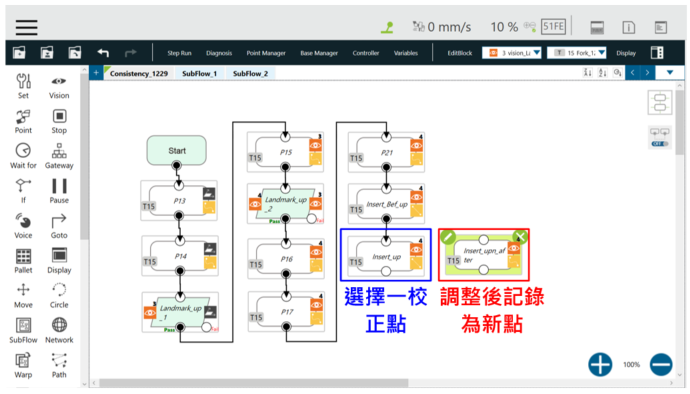
- 在專案中開啟一個新的副流程(Subflow),並進行以下編輯:
- 新增一Set節點(SET1),在兩個變數中寫入校正點調整前(舊)與調整後數值(新)。
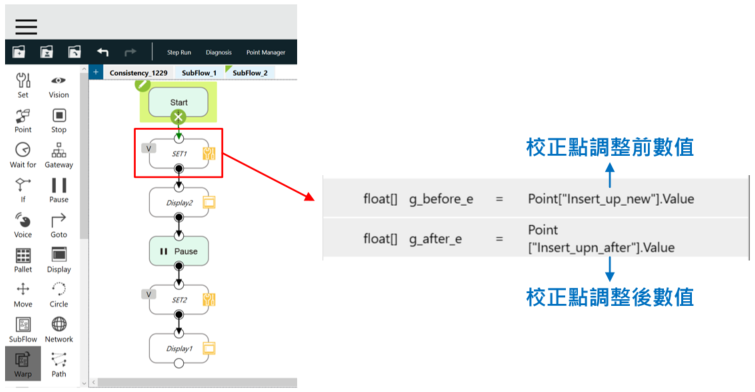
- 新增一Set節點(SET2),利用函式trans() 計算新舊兩點的差值(括號內變數需新點在前,舊點在後),再使用函式applytrans() 將原TCP套用點位差值以計算出修正TCP,並將結果記錄於對應變數中。[相關函式說明可參考Expression Editor]

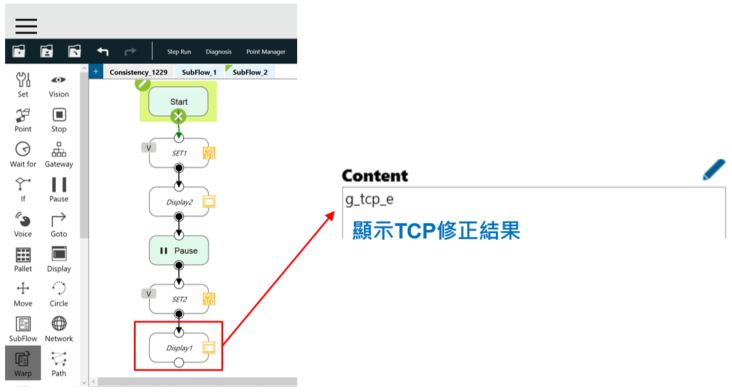
- 新增一Display節點,顯示SET2節點中修正TCP計算結果。
- 新增一Set節點(SET1),在兩個變數中寫入校正點調整前(舊)與調整後數值(新)。
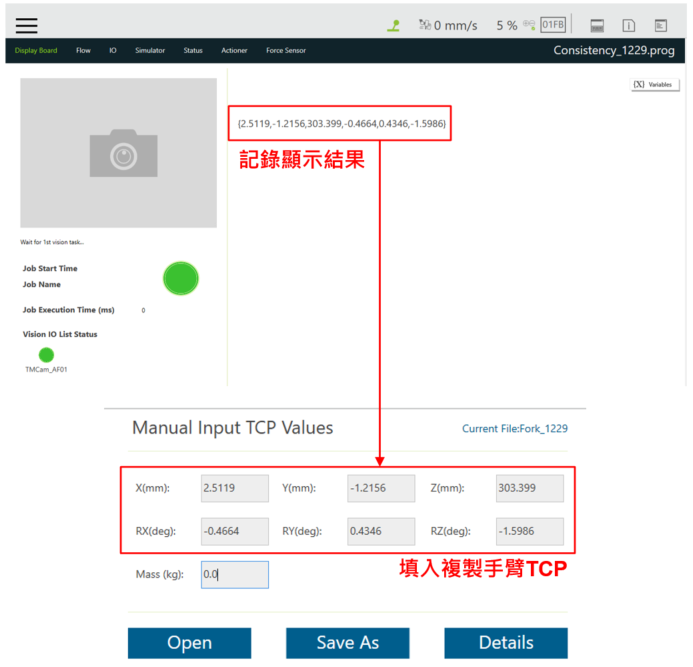
- 執行副流程後記錄顯示頁面上的數值,並填入複製手臂的TCP中。
- 執行專案驗證結果:
[若無可省略]
先在校正區檢視機差校正結果,執行專案後螺絲大致有對齊。
移動至工作區域實際執行取FOUP任務,若使用原TCP雖可插入FOUP,但有明顯的傾斜角度,經機差校正後,可正確插入。

Q&A #
Q1. 為什麼在完成機差校正後,執行結果仍不理想?
A1. 原因與解決方法大致有以下幾點:
- Landmark辨識度不佳 → 開啟Landmark視覺任務,調整相機觀測方式與參數,將Landmark四個角的分數調到0.8以上。
- 兩隻手臂校正姿態差太多 → 調整複製手臂的姿態再重新校正。
- 修正的點位與校正點姿態差異太大 → 修正TCP僅適用與校正點同姿態的點位,不同姿態需再選擇一點另進行機差校正。
- 人眼誤差 → 使用校準針以人眼對齊仍存在約0.3 mm的誤差,可設計插件與相對應的插孔來提升校正精度。
Q2. 這組修正TCP可泛用於所有點位嗎?
A2. 不可,見A1.(3)。另外,即便為相同姿態,一組修正TCP仍有應用範圍限制,見可修正範圍;離校正點越遠,修正後的誤差就越高。
Q3. 若我的專案中點位分佈範圍太廣會超出修正範圍該怎麼辦?
A3. 先將專案內點位根據機差校正修正範圍分割成數個群,每一群中選擇一校正點進行機差校正(注意手臂姿態),再將算出來的修正TCP另存成一新TCP,並將各群中的點位TCP以工具偏移替換成對應的新TCP。
範例影片 #
影片連結: Deviation Calibration


