Table of Contents
| 主模組名稱 | ADLink
EPS-6000 |
BECKHOFF
EK1100 |
DELTA
R1-EC5500D0 |
Weidmuller
UR20-FBC-EC |
OMRON
NX-ECC201 ECC202 ECC203 |
| # Digital Input 數位輸入點 | 128 | 128 | 128 | 128 | 128 |
| # Digital Output數位輸出點 | 128 | 128 | 128 | 128 | 128 |
| # Analog Input Channel 類比輸入點 | 2 | 2 | 0 | 0 | 0 |
| # Analog Output Channel 類比輸出點 | 2 | 2 | 0 | 0 | 0 |
| 子模組名稱 | DIO / AIO Module | DIO Module | DIO Module | WPA-133491 WPA-131539 WPA-131544 WPA-131520 WPA-131525 |
NX-ID4342 NX-ID4442 NX-ID5342 NX-ID5442 NX-ID5142-5 NX-ID6142-5 NX-OD4121 NX-OD4256 NX-OD5121 NX-OD5256 NX-OD6121 NX-OD6256 |
支援的手臂電控箱版本 : 1.x/2.x/3.x
支援的手臂軟體版本TMflow : 1.76 或更新的版本
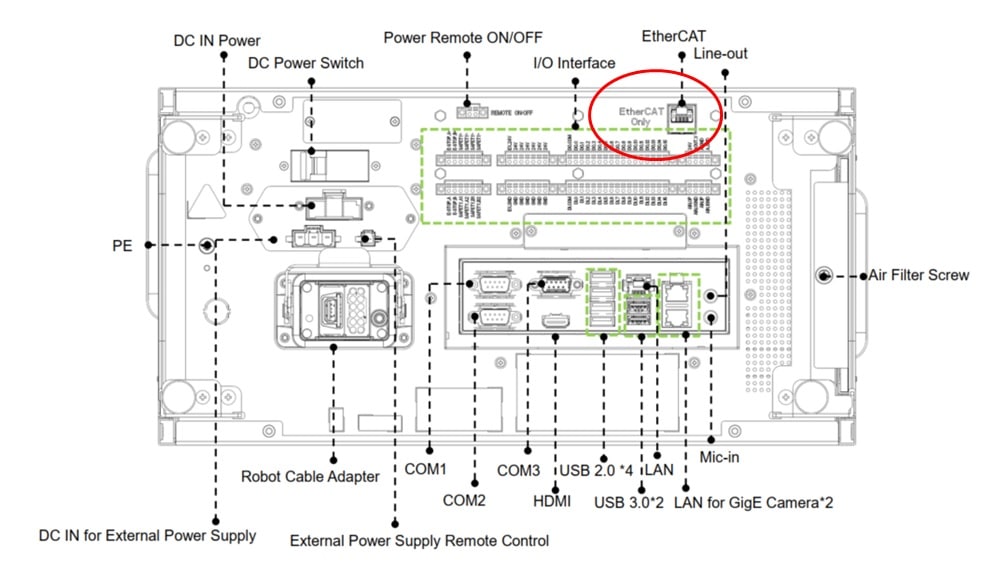
如何連接EtherCAT遠端I/O模組? #
- 將手臂關機
- 移除任何外部電源
- 將模組電源接上(如+24V / 0V)
- 將EtherCAT專用線材接上手臂電箱的EtherCAT專用孔位、以及遠端模組的EtherCAT孔位
- 啟動手臂,新的I/O訊號會自動出現在TMflow裡的I/O列表中
- 到此步驟,遠端模組已可正常使用
如何確認手臂能否支援某遠端模組? #
若某模組不在上方列表,請將以下檔案與簡單介紹附在檔案內並聯絡我們,我們會幫您確認:
EtherCAT Slave Information file(*.ESI)
EtherCAT Network Information file(*.ENI)
請在此連絡我們:


