此文章之範例適用於下列條件:
TMflow 軟體版本: 1.76.6300 或以上。
TM 手臂硬體版本:所有版本皆適用。
請注意,新舊版本之差異可能導致操作介面、步驟上會有所差異。
TM Landmark檢查 #
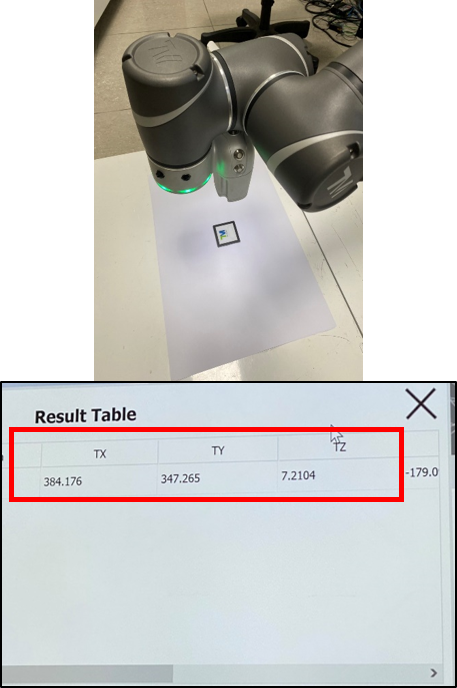
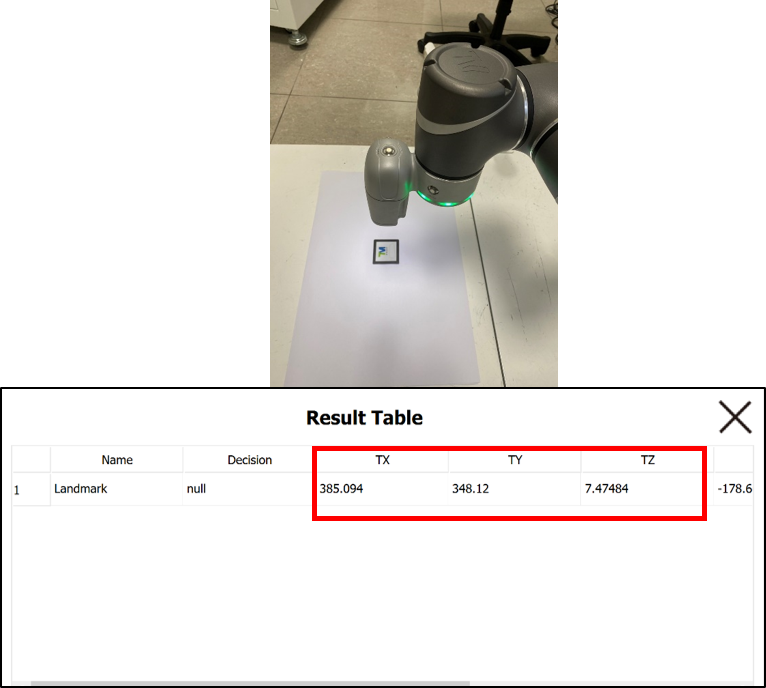
放一塊LM,在不同的工作平面下與不同的姿勢下,正反轉第六軸看手臂各數值是否在正負0.5mm(XYZ/RXRYRZ)內
- 建立一個vision node,landmark 定位,選擇finish 流程,並開啟中間上方結果表格
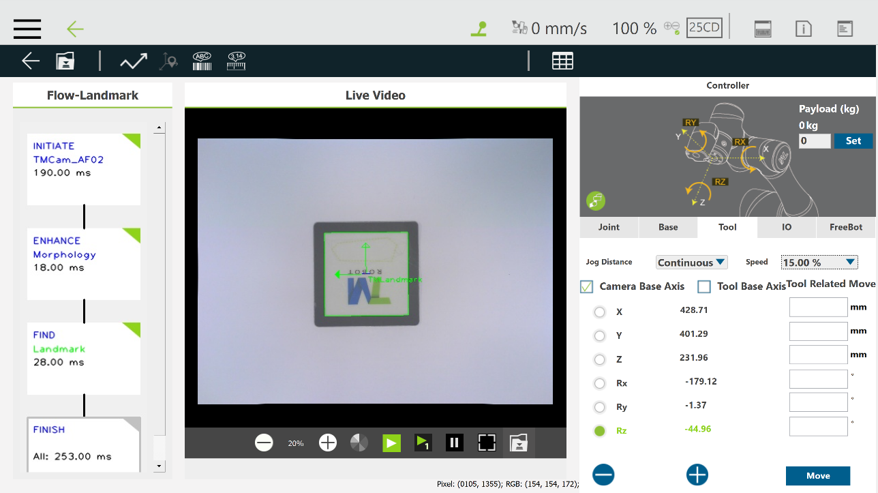
- 在不同的RZ位置(例如 0度或180度),各值誤差需在0.5mm 以內
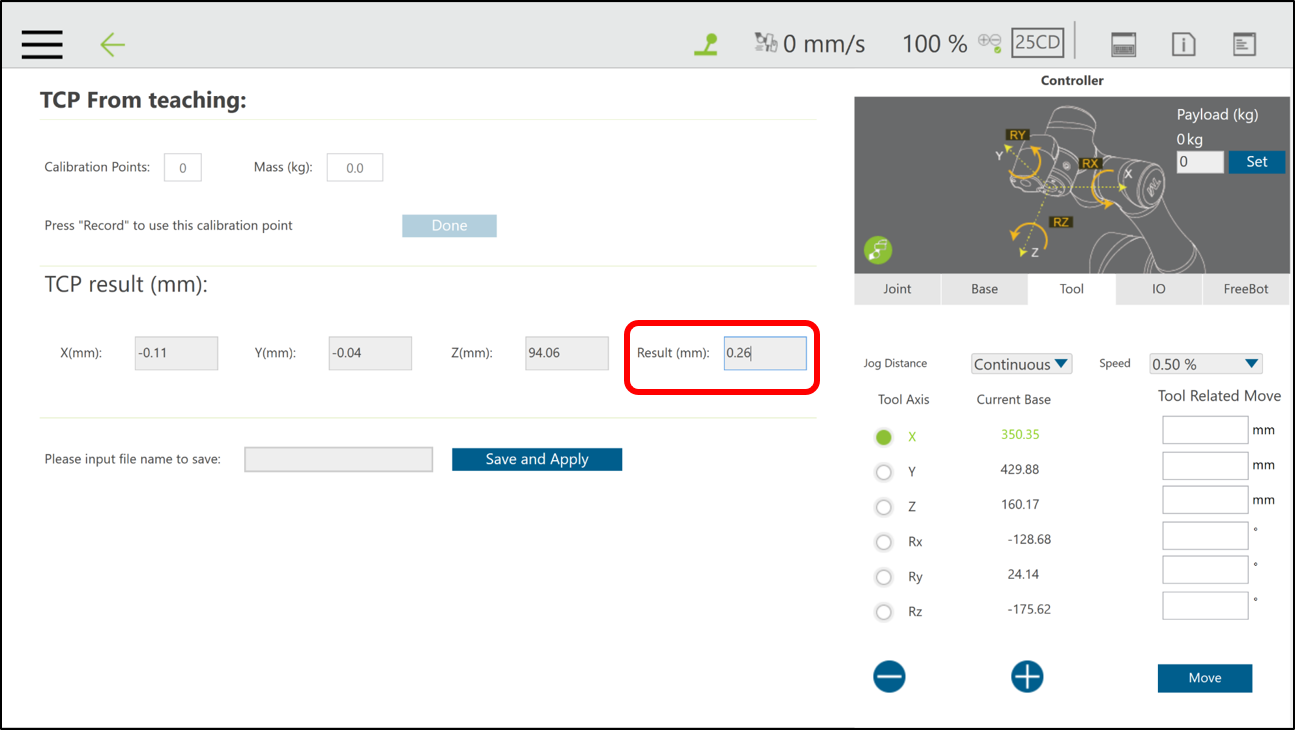
檢查TCP教導數值 #
請重新教導TCP,並且確認教導後的TCP誤差收斂值需小於0.3(如下圖)
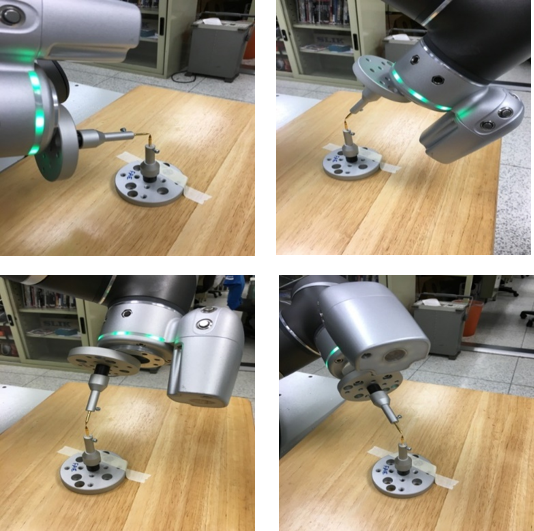
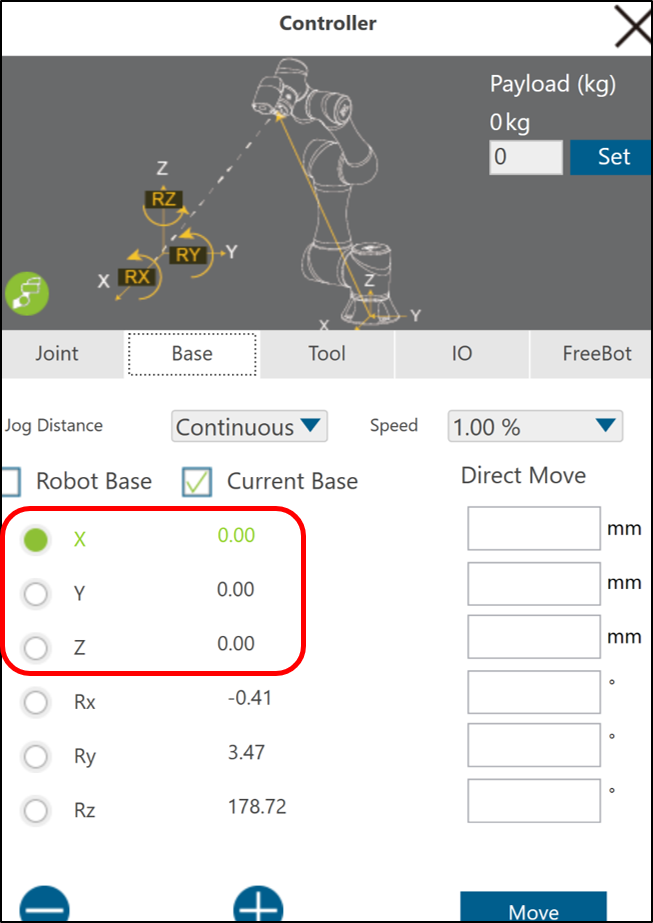
利用TM Landmark檢查手眼關係 #
安裝上校正尖組,使用 LM_BASE為當前坐標系 Base 輸入0,0,0 看校正尖組會不會戳入B的左上角

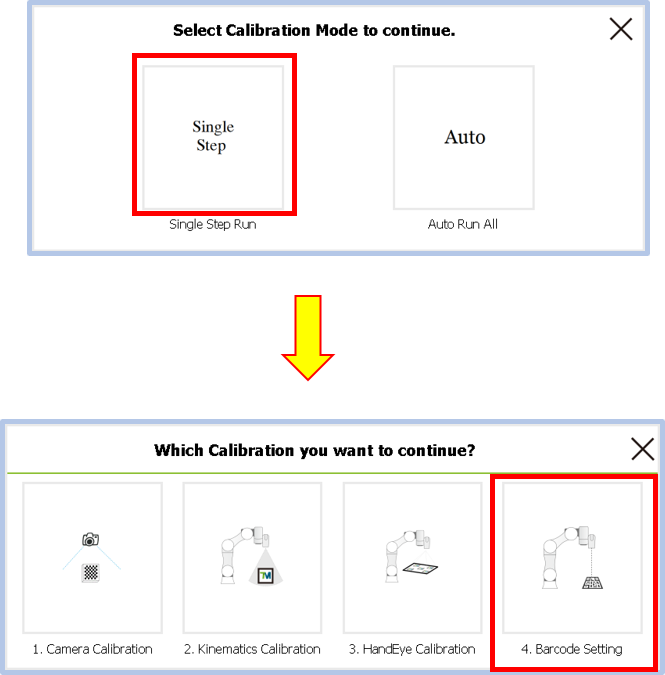
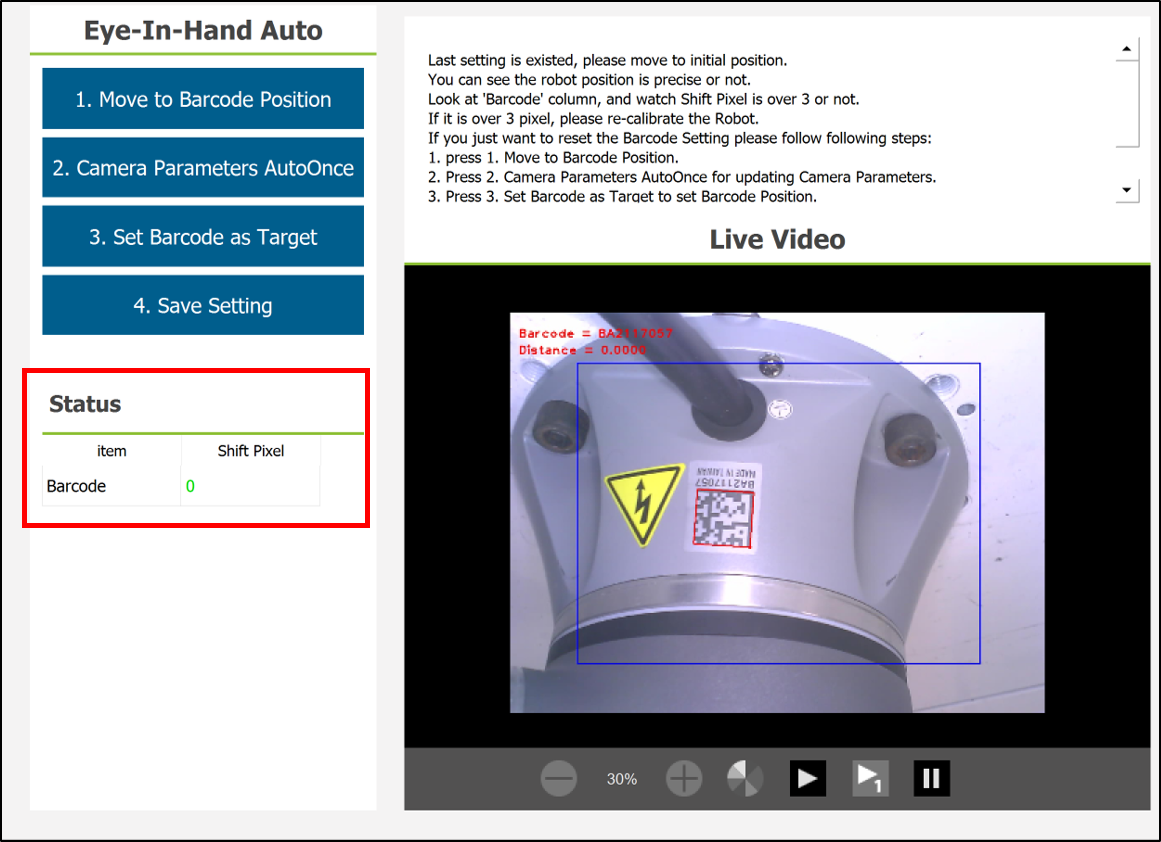
維修工程校正QRcode Check(僅供TM原廠代理商參考) #
- 使用Maintenance mode vision 第四步,照後面出線孔旁QRcode檢查與上一次校正值的誤差,若大於3 pixel 則做兩個點的重複精度測試(建立兩個點位並反覆移動,並讀取其座標數值)
- (若準度在該工作站的誤差內,則可忽略誤差 >3 pixel)