TMflow 軟體版本: 所有版本皆適用。
TM 手臂硬體版本:所有版本皆適用。
透過 TMflow 輸入夾具的TCP(Tool center point)、重量與質心,手臂才能透過計算賦予各軸合理力矩,以分配各軸關節的輸出,避免施力錯誤造成手臂報錯或是故障。
當TCP未適當設置時,手臂在運行過程中可能因為異常負重導致錯誤發生(0x22, 0x35),當錯誤發生時,請優先確認TCP Payload有正確設定。如果出現無法排除的狀況,請聯絡合格授權的服務人員。
手臂可承受之最大負載及力矩請參考「Hardware Installation Manual 負載與力矩」。

關於專案負載設定
不正確的負載設定可能導致手臂在運作過程中觸發安全機制而停止,而不正確的負載設定將可能減少軸關節的使用壽命或損壞機器人。使用者應針對端效器與工件進行完整的風險評估,以免衝擊、震動、撞毀、纏繞、突刺、穿刺等危害,確保系統整體安全。
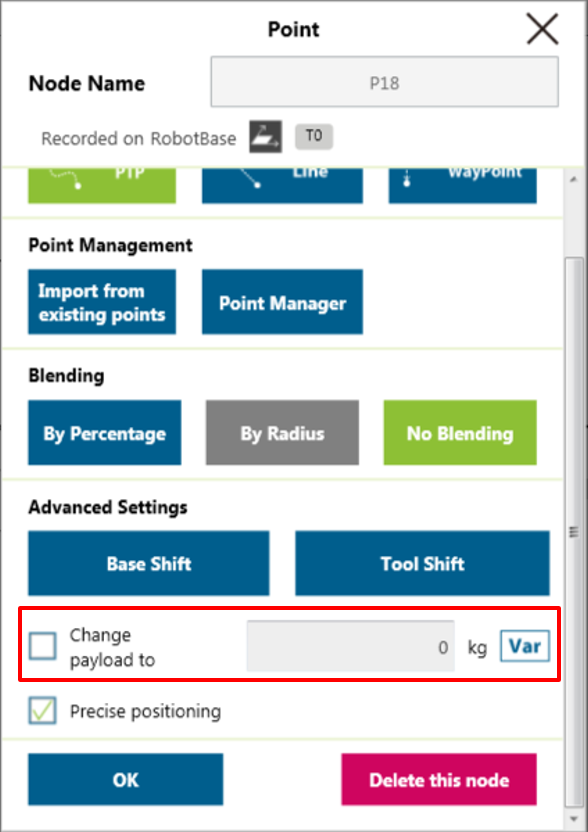
計算負載時,必須將端效器與物件重量一併計入並確保整體重量不超過最大容許負載。設置手臂負載時,不僅須於「工具中心點設定」設置適當TCP參數,當手臂運行專案時,若於同一個專案內可能取放不同重量的物件時,也須在Point內設置物件的重量,以避免手臂負載總重量與設置參數不一致所引發的異常。