Skip to content
登入
繁體中文
English
简体中文
Deutsch
日本語
한국어
登入
繁體中文
English
简体中文
Deutsch
日本語
한국어
產品
NEW!
TM AI Cobot
TM5 – 700
TM5 – 900
TM12
TM14
TM16
TM20
移動式機器人系列
TM AI Cobot S
TM5S
TM6S
TM7S
TM12S
TM14S
TM20S
TM25S
TM30S
堅固式機器人系列
軟體
TM 3DVision
TMflow
力量感知功能
AI視覺
AI視覺介紹
TM AI+ Trainer
TM AI+ AOI Edge
TM Image Manager
開發者專區
TM ROS Driver
TMcraft
TMscript
配件
TM Accessories
TM Plug&Play
解決方案與自動化服務
解決方案
Palletizing 解決方案
Welding 解決方案
AMMR 複製解決方案
自動化服務
系統整合服務
實例應用
應用影片
部落格
教學訓練與支援
教育訓練
TM Academy
線上課程
顧客支援
聯絡我們
檔案下載中心
技術文件
論壇
Partner Area
關於我們
關於達明
關於我們
公司簡介
全球活動
達明新聞
歐姆龍合作夥伴
尋找代理商
投資人專區
財務資訊
月營收報告
財務報告
公司年報
重大訊息
法人說明會資料
股東服務
投資人關係處理窗口
股務資訊
公司治理
組織架構
董事會
功能性委員
公司治理規章
利害關係人處理窗口
ESG
All Categories
1. Getting Started
1. Getting Started
2. Configurations
2. Configurations
3. FAQ
3. Maintenance & Repair
3. Software Update
4. FAQ
Communication
EtherCAT
EtherNet/IP
General
HMI Interface
Industrial Applications
Modbus
Point Node
Profinet
Robot Controller
service manual
SERVICE MANUAL - MAINTENANCE & REPAIR
Service Manual - Maintenance & Repair
System Setting
TM 3DVision
TM AI+ AOI
TM AI+ Training Server
TM Image Manager
TM Palletizing
TM Plug&Play
TM Robot
TM Robot Management API
TM ROS Driver
TM Vision
TM Welding Solution
TMcraft
TMvision
Troubleshooting Guide
Upgrades and Installations
What's New
半導體產業應用範例介紹
汽車製造業應用範例介紹
電子產業應用範例介紹
Popular Search
tm5
modbus
vision
profinet
tm-
Home
Docs
TM Vision
3. FAQ
利用三點定基準來解決手臂換修或複製線上的”專案重教點位”是什麼方法呢?
利用三點定基準來解決手臂換修或複製線上的”專案重教點位”是什麼方法呢?
Table of Contents
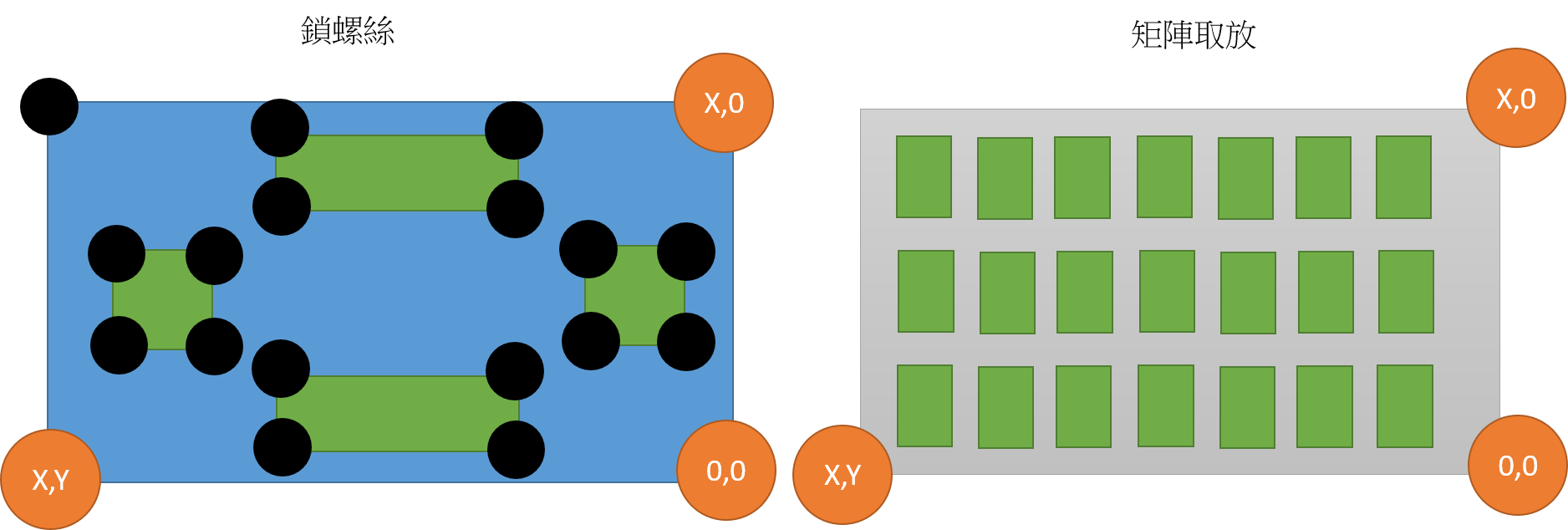
實際應用
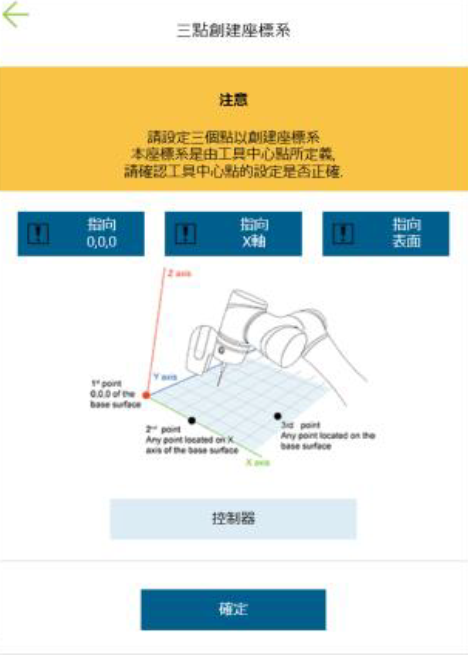
三點產生新座標系
考慮誤差程度該注意哪些
實際應用
#
三點
產生新座標系
#
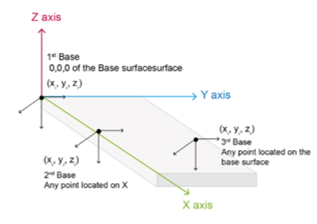
原理:以三個點位建立座標(如右上圖)
教導的三點分別為
原點
X軸上的點
XY平面上的點
優點 : 自定義座標系方向較直覺
考慮
誤差程度該注意哪些
#
換手臂前,請先確認「原本所教的點位」是否有「帶正確的TCP」
「3點Newbase」是否有先刷新
點位是否建於「3點Newbase」上
換手臂後 Auto TCP(或至少手動教TCP)
重新教「3點Newbase」
測跑點位是否正確
工程模式下的各種校正意義與做法
Powered by
BetterDocs