此文章之範例適用於下列條件:
TMflow 軟體版本: 所有版本皆適用。
TM 手臂硬體版本:所有版本皆適用。
其他特殊軟硬體需求: 不限任何RoboDK軟體版本
請注意,新舊版本之差異可能導致操作介面、步驟上會有所差異。
RoboDK特性 #
六軸手臂是用六個軸去計算每個位置,所以在密集點會計算每個角度是否到位,ROBODK匯出路徑則是採PATH方式進行,等每個角度都到了才會繼續執行,所以有些點位會有過度移動現象,有些則會有抖動現象,須注意角度太密集節點。

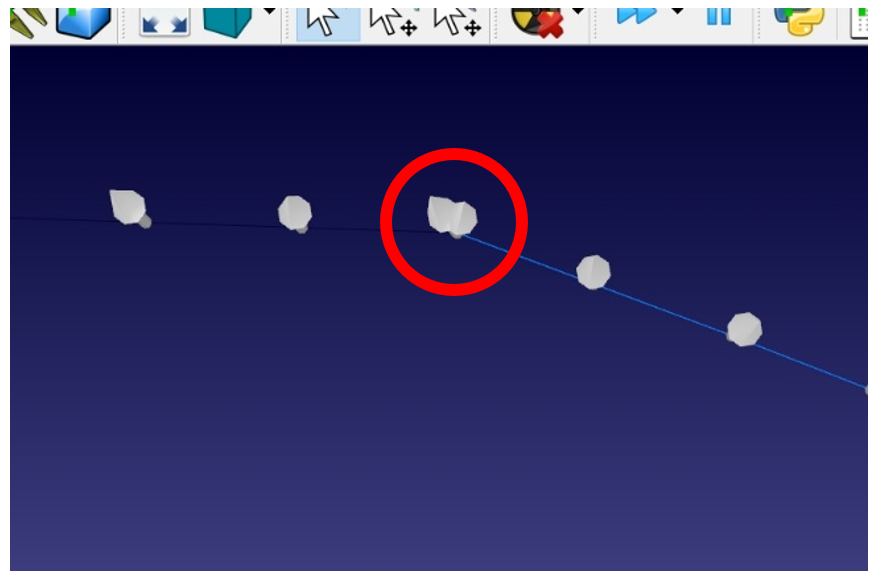
刪除密集點位前 #
刪除密集點位後 #


