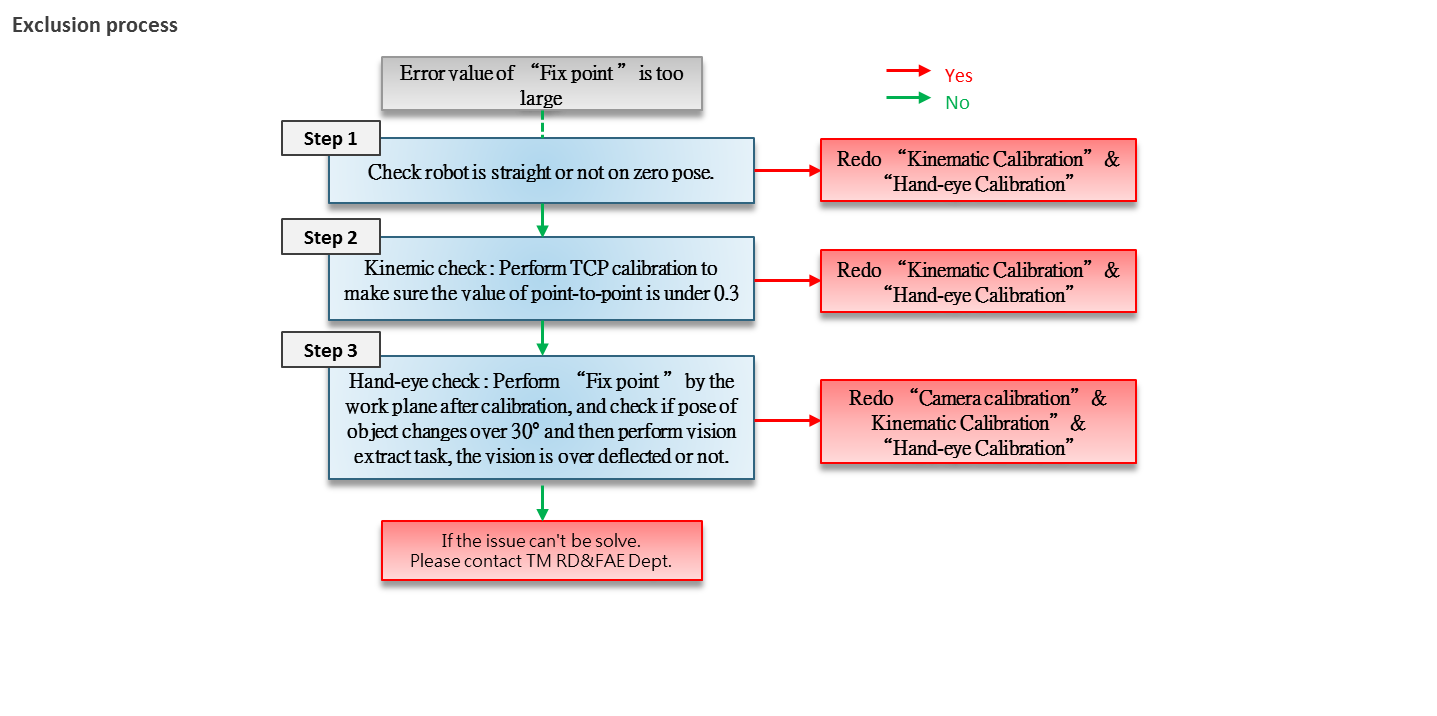
| Case description: | This section describes possible faults and recommended actions for each fault when Error value of “Fix point ”is too large. | |
| Result: | The error value is too large after calibration of “fix point” | |
| Possible reason: | 1)Joint has shifted.
2)Robot is not straight on zero pose. 3)The error value of kinematic calibration is too large. |
Common error code
NA |
| Symptom: | 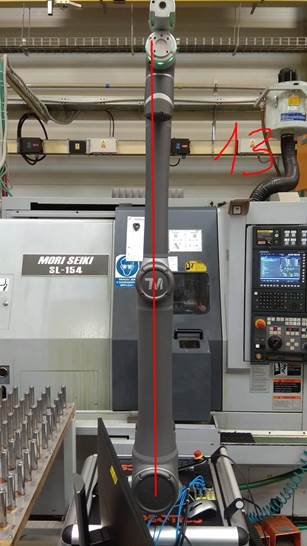 |
|