目標 #
當手臂附帶的視覺處理能力不足以應付現場需求時,可以透過此方法將手臂影像傳到外部電腦處理、再將結果回傳至手臂進行下一步動作。
以下將介紹此範例的實作方法。
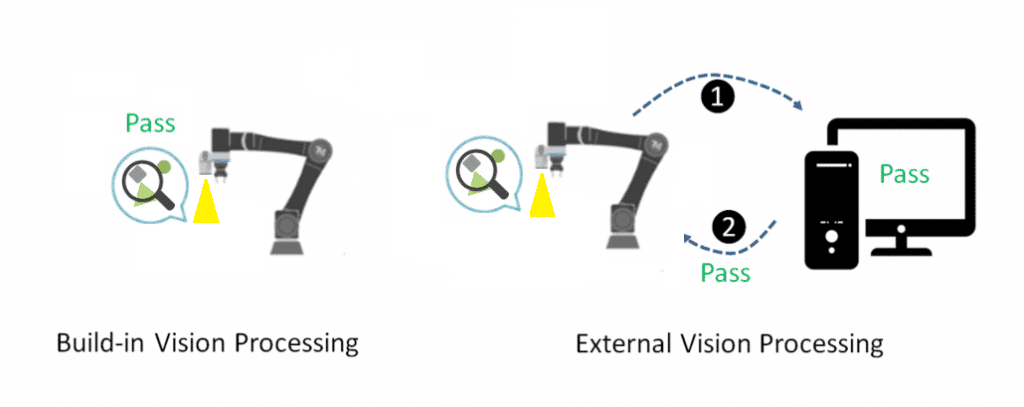
什麼是外部影像處理? #
手臂附帶的TMvision視覺功能可以進行大部分視覺辨識工作。但有些較複雜的情景、使用者可能需要使用外部影像處理(External Vision Processing)來輔助手臂工作。
前置工作 #
- TM手臂 – TMflow 1.84以後的版本,不需特殊license dongle
- 外部電腦 – Win10 64bit
- TMvision 1.84 手冊 – 可以在下載中心找到
- 可參考上面手冊的External Classification/External Detection章節
- 下載 Sample : V2
- 對於Python, TMvision有基本認知
註:Sample裡面有C++與Python的範例。以下將以Python進行解說。您可以自己修改並用運範例。
執行External Classification(外部分類)範例 #
步驟1. [PC上] 安裝適合Python的環境 – 請在Python Sample裡的README.md 找到詳細說明
步驟2. 設定外部電腦IP為(192.168.132.100)、手臂IP(192.168.132.44)
步驟3. 在PC上執行HTTP server
完成以上步驟,代表HTTP server已經在外部電腦192.168.132.100:4585開始運作
HTTP server會持續接收手臂來的照片

步驟4. [手臂端] 在TMflow專案內創造Vision Job
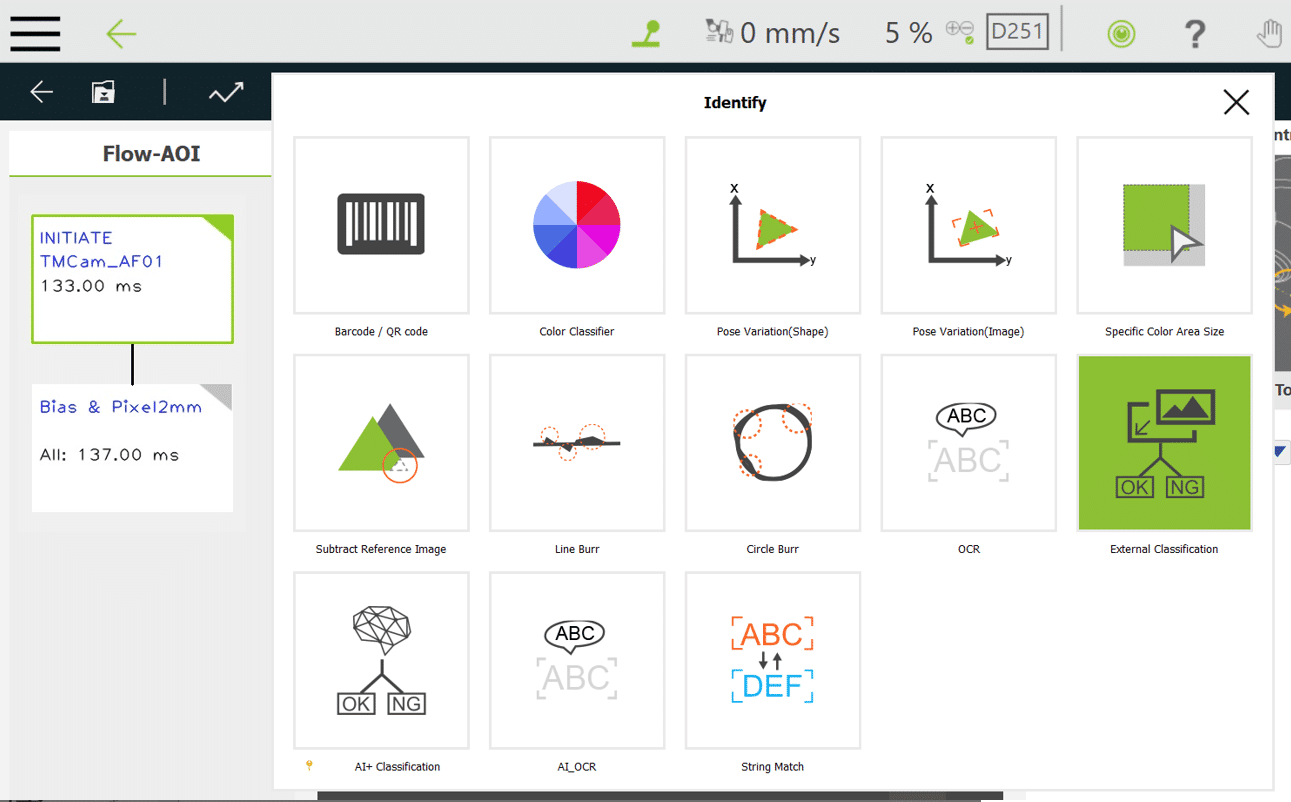
步驟5. 在Vision Job內選擇 External Classification
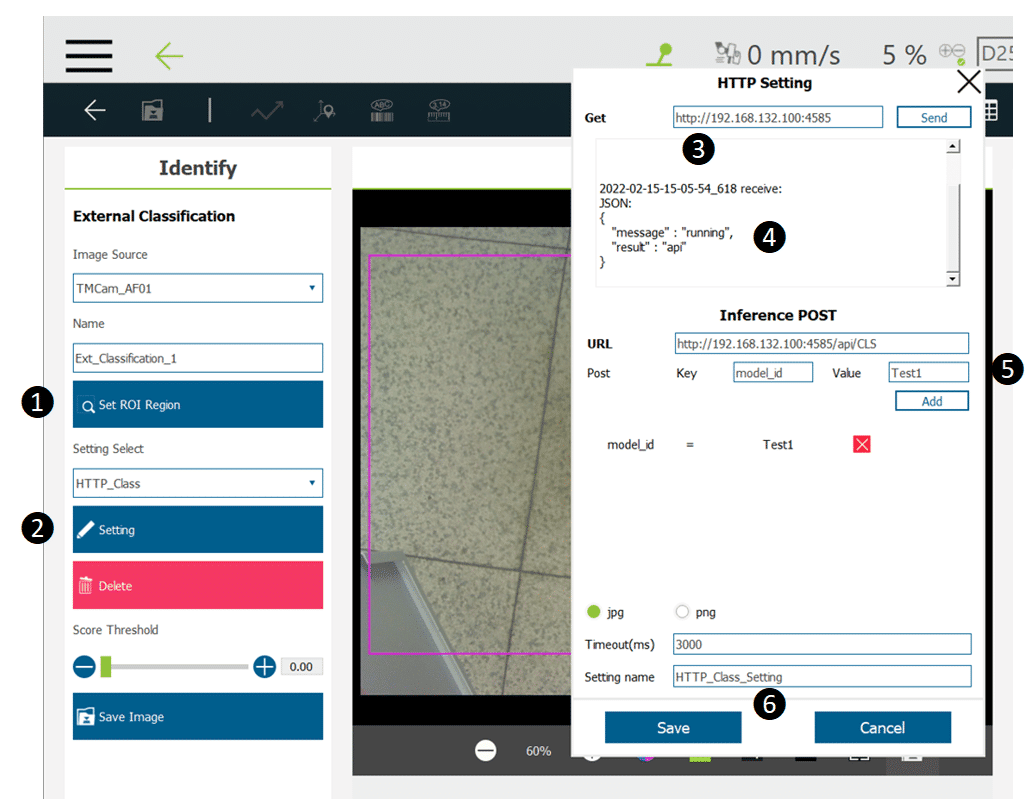
步驟6. 設定HTTP server路徑
- 輸入外部電腦IP,測試連線是否成功(步驟3)
- 輸入 http://電腦IP/api/CLS in #5, 注意[/api/CLS] 在Python sample裡定義,您可修改此路徑
- Save儲存設定、並離開vision job頁面
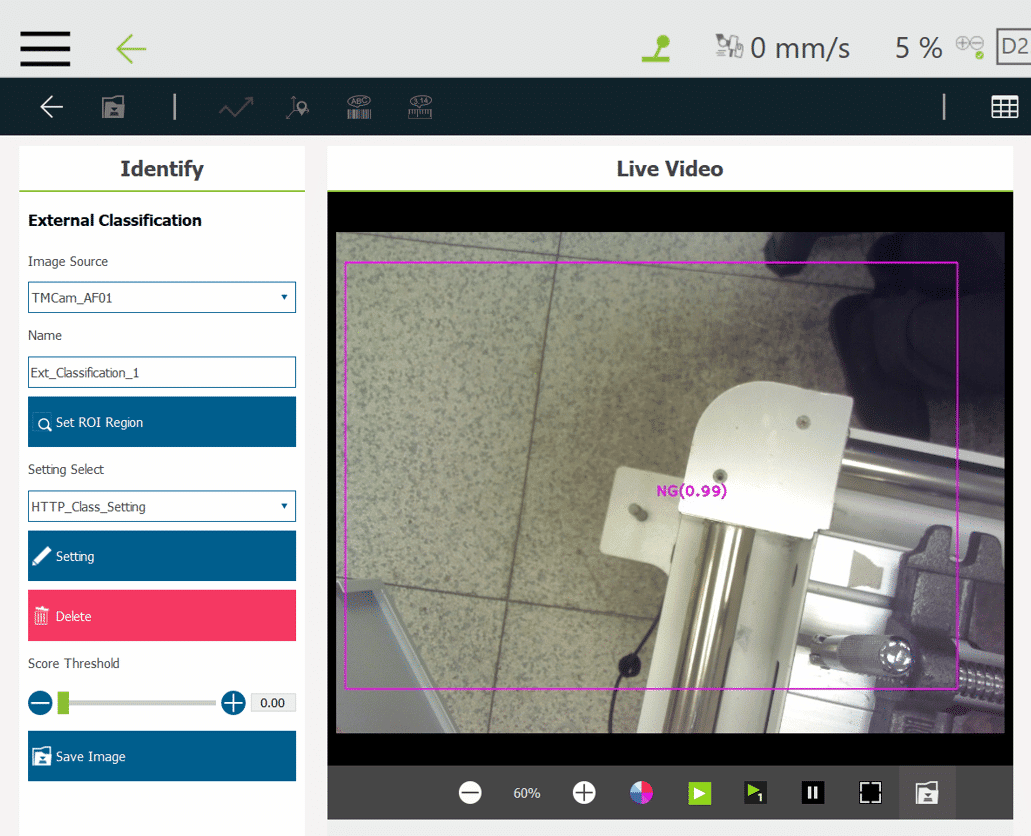
步驟7. 檢查結果Step7.
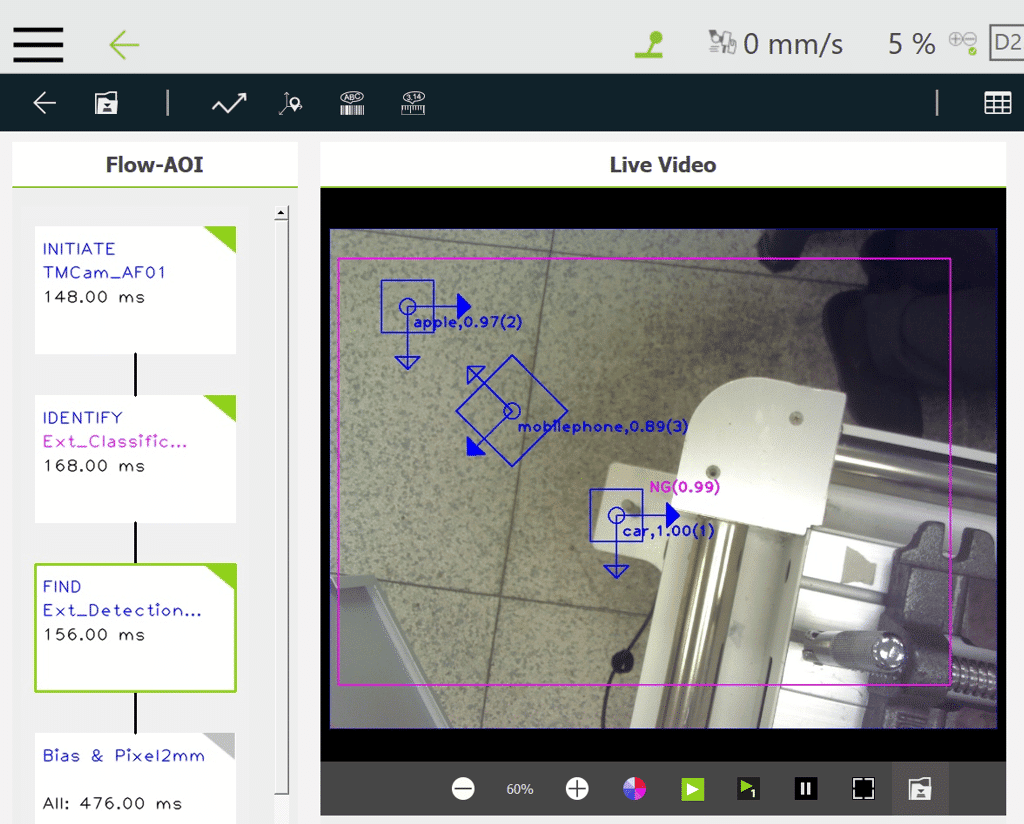
到此步驟已完成設定。在此畫面下,外部電腦的HTTP server會持續取得手臂的即時影像並回傳[NG][分數0.99]到手臂。
記得儲存並離開此頁面。
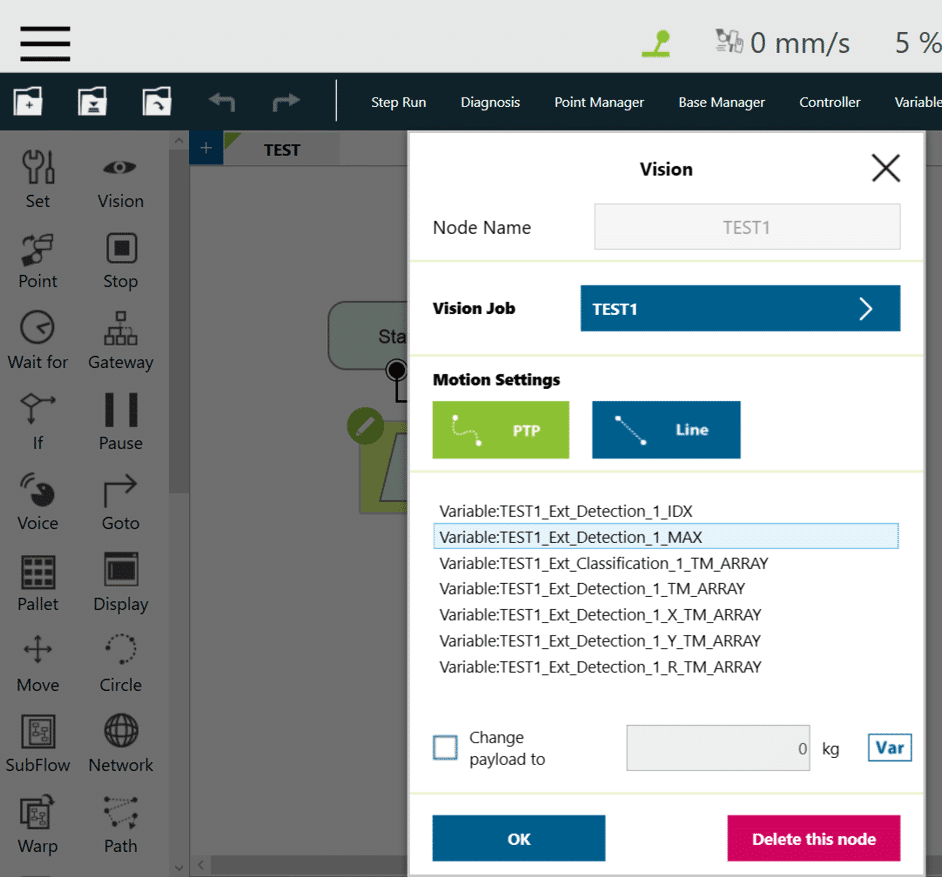
設定完之後,預設變數 TEST1_Ext_Classification_1_TM_ARRAY 會自動加入以供後續利用。
執行外部偵測(Exteranl Detection)範例 #
大部分與上述的步驟1~步驟7相同,差別在於步驟6.
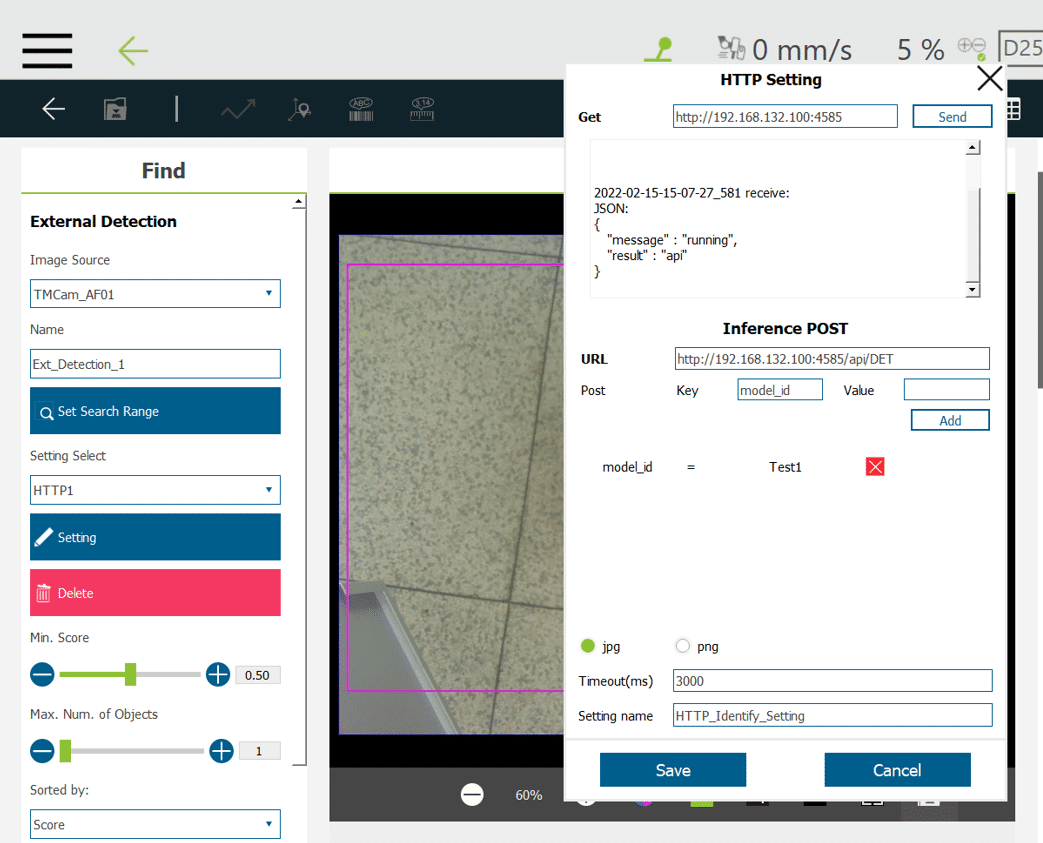
步驟6. 設定HTTP server
輸入http://IP/api/DET , 其中[/api/DET],注意[/api/CLS] 在Python sample裡定義,您可修改此路徑
步驟7. 檢查結果
到此步驟已設定完成,外部電腦上的HTTP server會接收手臂的照片、並送出3個假的物件結果