此文章之範例適用於下列條件: TMflow 軟體版本: 1.76.6300 或以上。 TM 手臂硬體版本:所有版本皆適用。 請注意,新舊版本之差異可能導致操作介面、步驟上會有所差異。
奇異點 #
TM Robot的奇異點,共分為三種:
- 內側空間奇異點
- 延伸性空間奇異點
- 腕部空間奇異點
內部空間奇異點: #
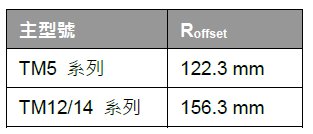
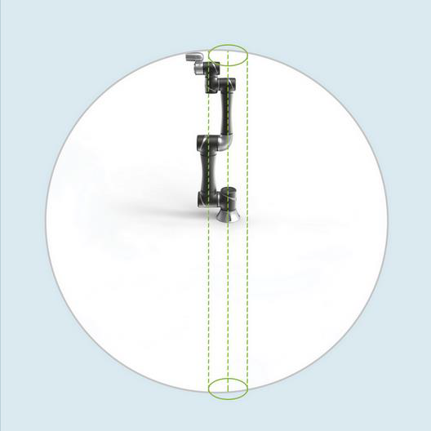
第五、六軸之旋轉軸交點,至第一軸旋轉軸之延伸線的距離,定義為Roffset。以以距離為半徑,中軸線坐落於第一軸旋轉軸之圓柱體內,均為內部空間奇異點。一旦機械手臂接近內部空間奇異點,手臂將停機並報出警告。各系列產品之Roffset值如下表所示:

延伸性空間奇異點: #
當第三軸幾乎為零度,手臂幾乎伸至最長,此時手臂接近其最大工作半徑。超出此半徑外之區域為延伸性空間奇異點。一旦機械手臂接近區域,手臂將停機並報出警告。
腕部空間奇異點: #
當第四、六軸為平行時會進入腕部空間奇異點,此時手臂的運動會造成第四軸大角度的位移,手臂會因為安全性與避免運動速度過快而停止。一旦機械手臂進入腕部空間奇異點,手臂將停機並報出錯誤。

解決奇異點 #
遭遇空間奇異點時的解決方法: #
當機器人遭遇奇異空間時,請確認手臂姿態。若手臂路徑穿越內部圓柱體,如下方圖示,請查閱下方第一點敘述;若手臂第四、六軸為平行,請查閱下方第二點敘述。
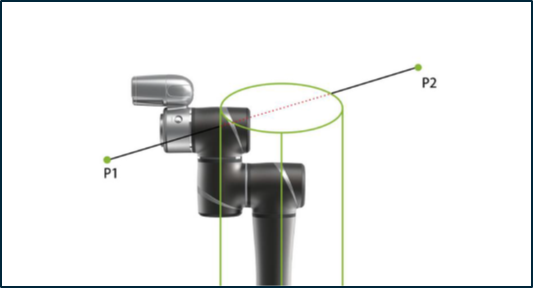
1.當手臂因內部空間奇異點而報出警告時,按下FREE按鈕即可解除。請重新考慮點位位置或改變點位間運動方式為點對點運動,避免點位間的手臂路徑穿越內部空間奇異點,如下圖。當路徑會穿越內部奇異空間時會觸發錯誤,請確認手臂路徑不會穿越內部空間奇異點。
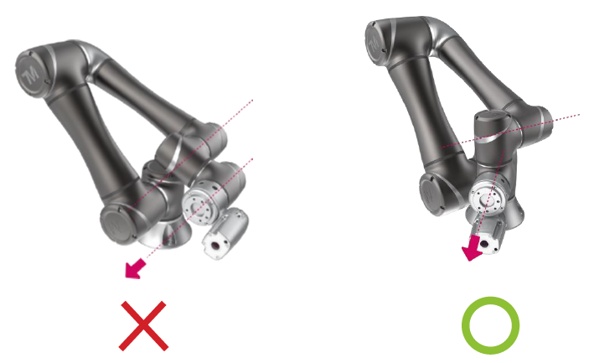
2. 當手臂因腕部空間奇異點而報出警告時,按下FREE按鈕即可解除。當第四、六軸平行時卻又嘗試指定工具坐標系Z軸運動時即會遭遇腕部空間奇異點,此時可參考下圖的方式改變姿態以避免四、六軸平行。