以下範例基於:
TMflow 軟體版本: 2.22.2400 或更新版本
TM Robot 硬體版本: HW5.02 或更新版本
其餘需求:參考準備章節
注意事項1:不同版本軟體可能會有不同結果。
注意事項2:TM不提供外部軸的硬體。整合商必須自行準備。
注意事項3:外部軸功能只能在真實硬體上使用,無法在TMflow Simulator(模擬器)使用。
目標 #
系統商可以依據此指引去整合外部軸(1軸或2軸),使TM機器人可以進行與外部軸同動的任務。適合用在焊接、塗膠等需要較複雜運動的場景。
術語 #
| 名稱 | 描述 |
| 外部軸/AUX | 外部軸的硬體 |
| Positioner Node/Toolbar | 使用TMcraft API製作的外部軸控制專用界面 |
| Base | 當下啟用的參考座標系 |
| TCP | 工具中心 |
更改日誌 #
| 日期 | 描述 |
| March 26 2025 | 第一版 |
| February 5 2026 |
|
準備 #
注意事項:
- TMflow2.22.2400 與 HW5.0 TM機器人
- 下載Positioner Node/Toolbar Package 並放到隨身碟 Download Here

- 外部軸的硬體 (僅支援Yaskawa 伺服馬達– Sigma X EtherCAT)
- 電腦與伺服馬達的設定軟體
- 伺服馬達的硬體配線
- 使用正確的TCP與Base參數
Related materials:
- TMflow Software Manual – TMflow的基本操作手冊。
- TMscript for Auxiliary Axis – TMscript外部軸指令。 Download Here
- Source Code of TMcraft Package –外部軸Node/Toolbar (Positioner Node/Toolbar)的原始碼。 Download Here
- TMcraft API – 此TMcraft API 為測試版本功能,特別增加外部軸的控制命令。請參考在Source Code 裡的範例來獲得更多訊息。
外部軸行為 #
- 外部軸與機器人是一體的。對機器人執行:緊急停止、停止、暫停、啟動等行為、都會同步在外部軸生效。
- 當機器人與外部軸同動時,TCP速度會是相對於外部軸的轉台中心來計算。例如,如果絕對速度設為10mm/s,且外部軸正在旋轉,則TCP會相對於轉台中心進行10mm/s的運動。
- 外部軸可以獨立進行移動。
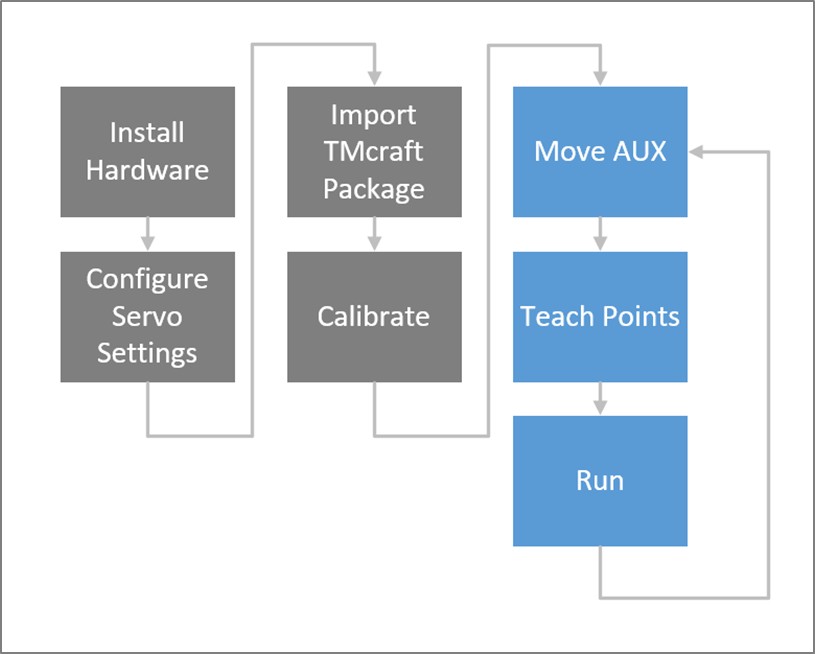
操作外部軸的工作流程 #
在操作外部軸之前,有些軟硬體流程必須先完成。接下來會進一步介紹。
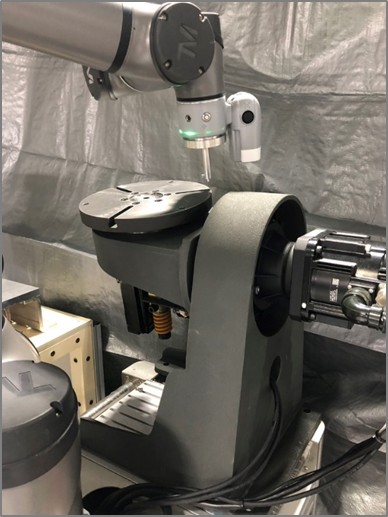
硬體安裝 Install Hardware #
額外的硬體必須要先準備好:
- 1或2軸的Yaskawa伺服馬達(Sigma-X系列)
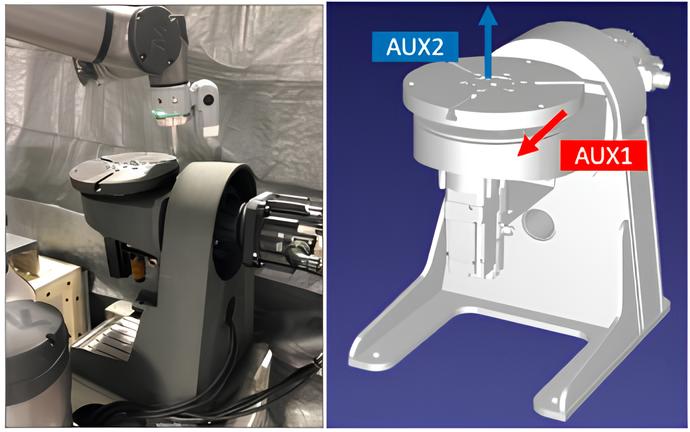
- 在此範例中,採用以下型號:
- 搖擺軸(AUX1)驅動器: SGDXS-7R6AA0A
- 搖擺軸(AUX1)伺服馬達: SGMXG-09AUA6CC2
- 旋轉軸(AUX2)驅動器: SGDXS-2R8AA0A
- 搖擺軸(AUX2)伺服馬達: SGMXJ-04AUA6EC2
- 接線範例:
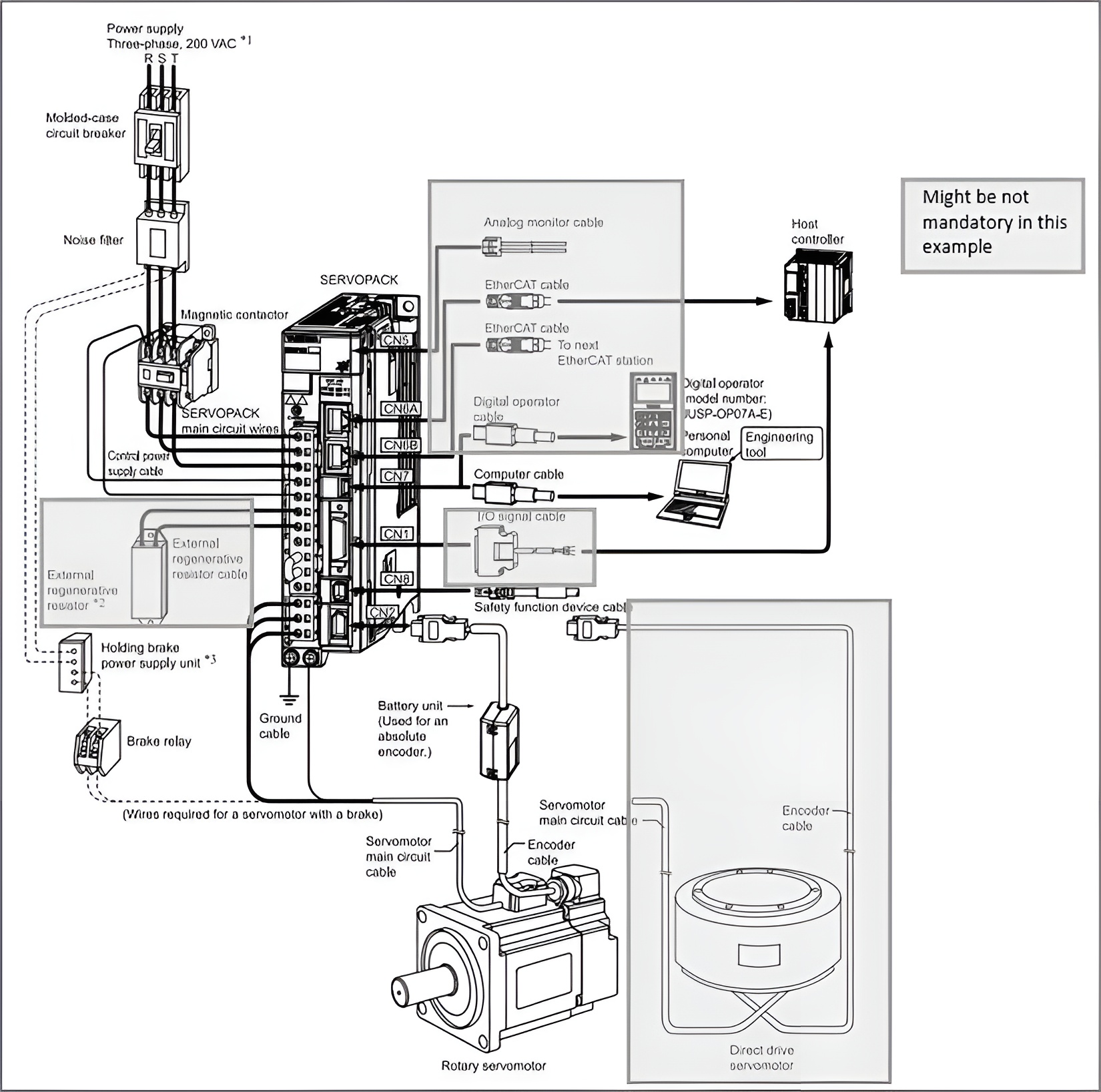
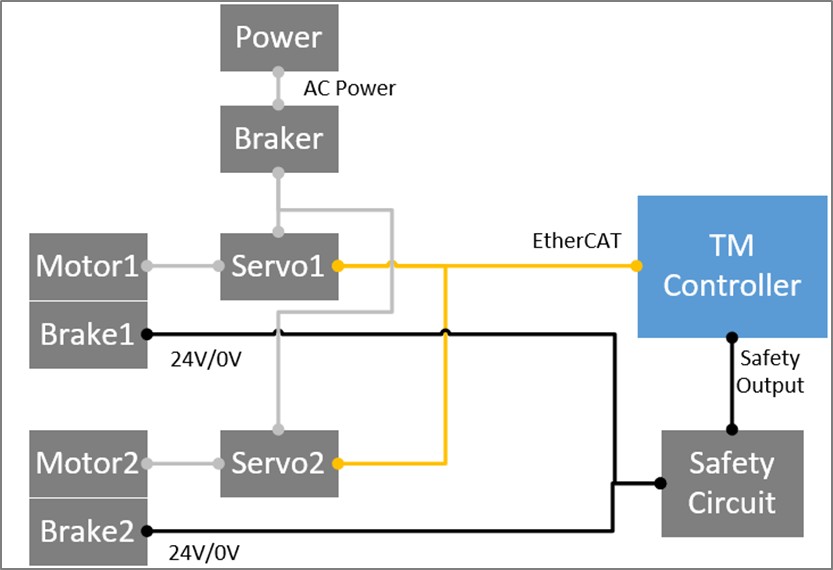
請參考Yaskawa手冊以獲得更多安裝上的說明。
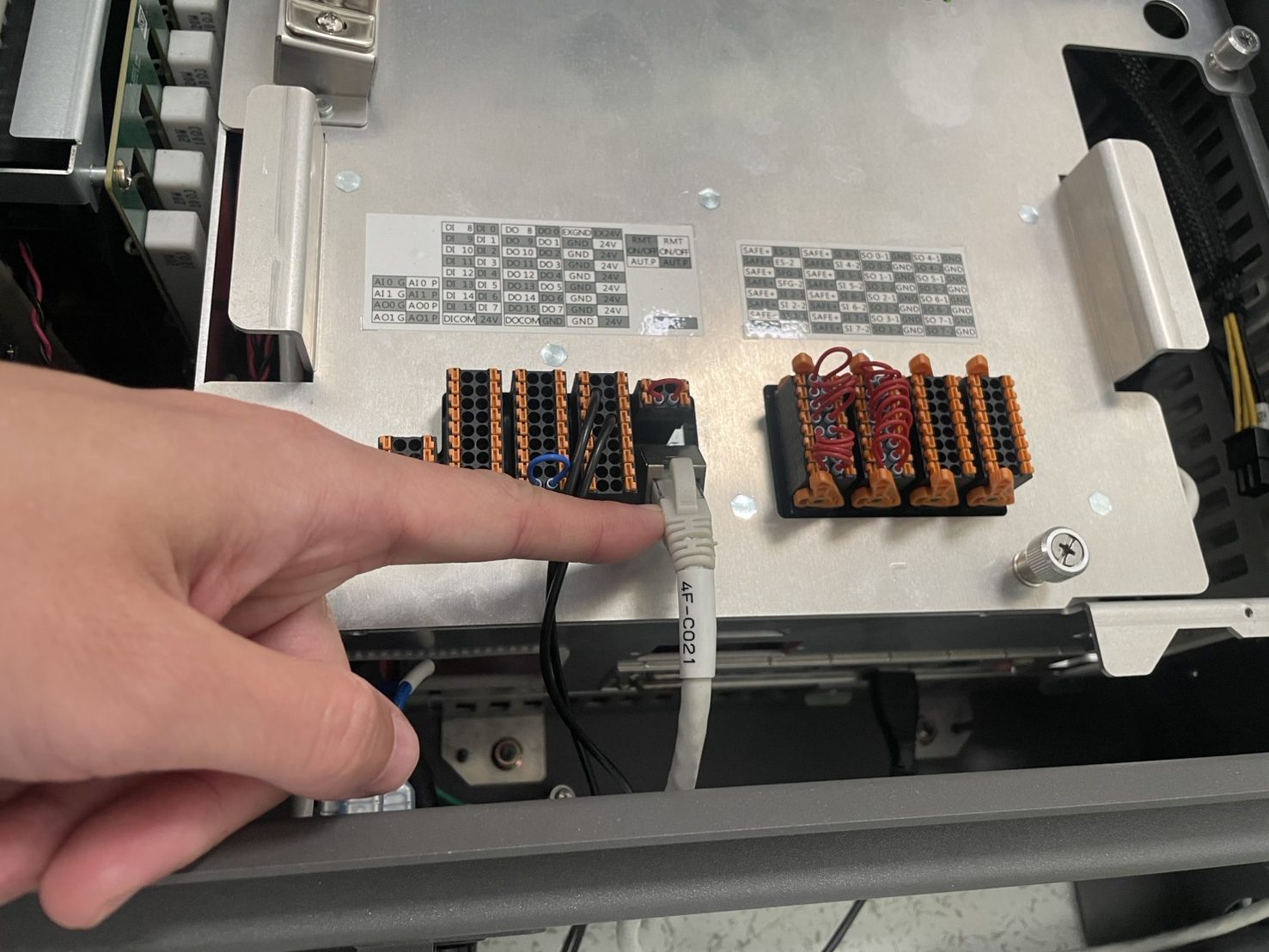
連接到TM機器人 #
使用EtherCAT線,來連接伺服驅動器與TM機器人。TM機器人的EtherCAT孔位如下圖。
煞車控制(可選) #
- 如果伺服系統搭配電磁剎車,須將剎車線連接到您的安全迴路上。
- 例如,連接24V+與0V到剎車上(B+/B-)、並連接到安全繼電器與緊急停止迴路上。
- TM機器人會對於伺服系統進行category 1 stop。如果TM機器人緊急停止被觸發,伺服系統會同時進行category 1 stop。
設定伺服馬達參數 Configure Servo Settings #
- 在電腦上安裝Yaskawa伺服馬達設定軟體(Sigma Win+)。
- 使用USB 線連接到伺服馬達驅動器,在軟體上執行伺服調校(servo turning)。
- 在Pn20E欄位輸入齒輪箱的齒輪比。
- 在軟體上設定原點。
- 依下表參數進行設定,然後重啟伺服馬達驅動器。
| 參數 | 值 |
| Pn000.0 | 使用右手定則,決定馬達正負轉方向(0/1) |
| Pn20E | 183
//齒輪比 |
| Pn210/Pn21D.0 | 1 |
| Pn21D.1 | 4 |
| Pn50A.3/Pn50B.0 | 8 |
| PnB18(6060h) | 8 |
| PnB48 | -53687090912 |
| PnB4A | 53687090911 |
| PnBBE | -2147483648 |
| PnBC0 | 2147483647 |
| PnC70 | 603F0010 H |
| PnCA4 | 9 |
| PnCB6 | 1600 H |
| PnCBC | 1A00 H |
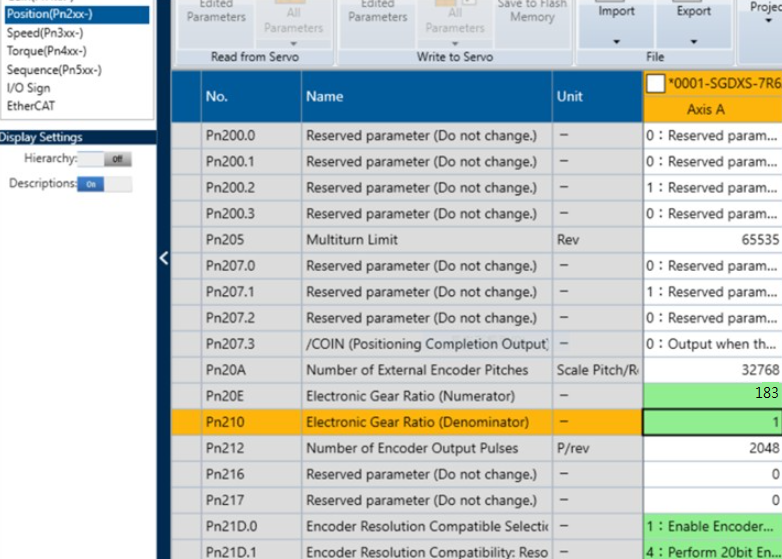
Sigma Win+ 參數設定畫面範例
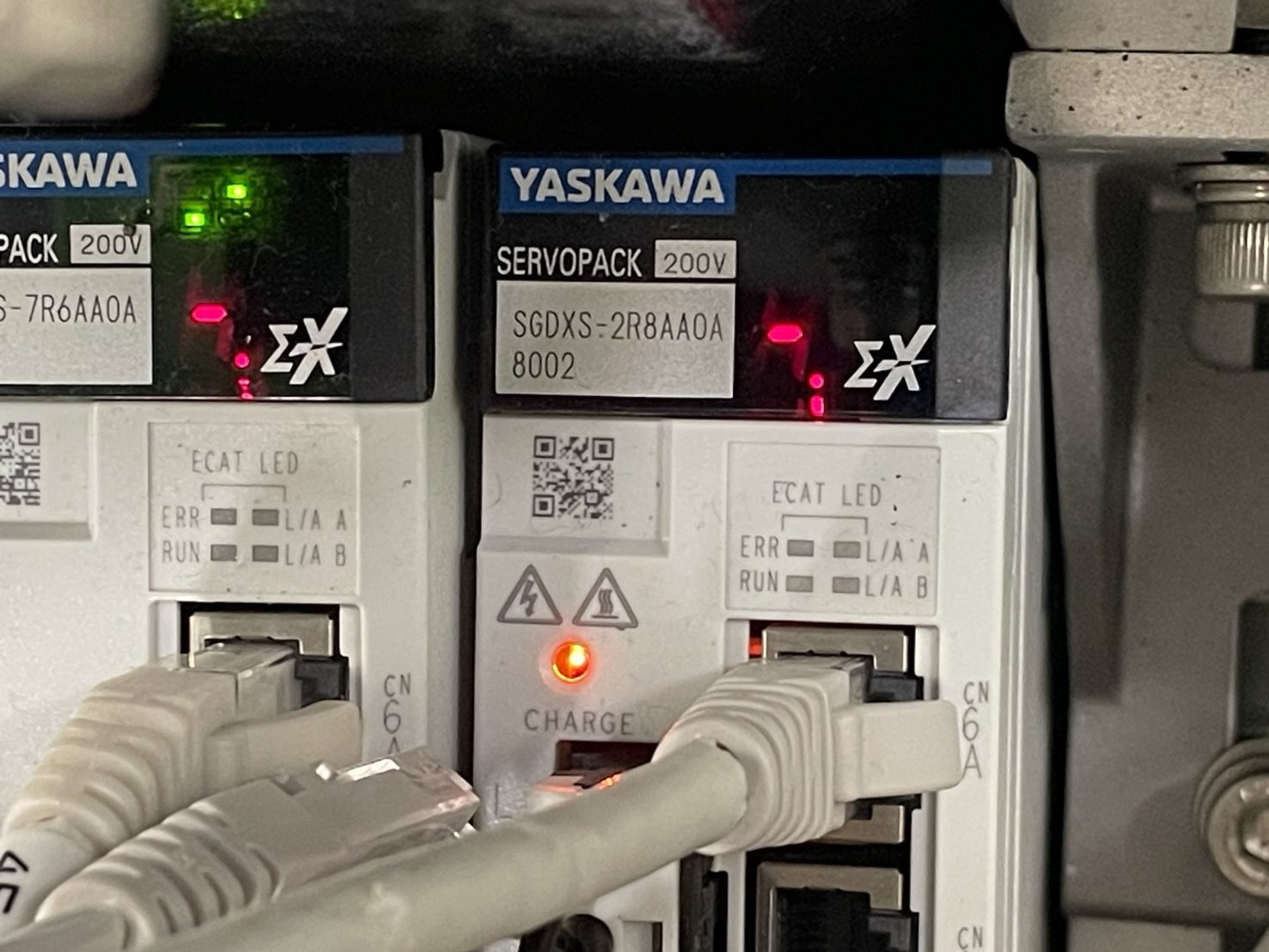
伺服馬達系統檢查 Servo System Check #
確保在7段顯示器上無任何錯誤碼
匯入 TMcraft 軟體包 Import TMcraft Package #
- [在電腦上] 準備一個隨身碟,並命名為TMROBOT。
- 解壓縮檔案(檔案在準備裡),複製資料夾TM_Export 到隨身碟的根目錄。
- [在機器人上] 在TMflow2上,到Menu/System/Import,匯入三個檔案 :
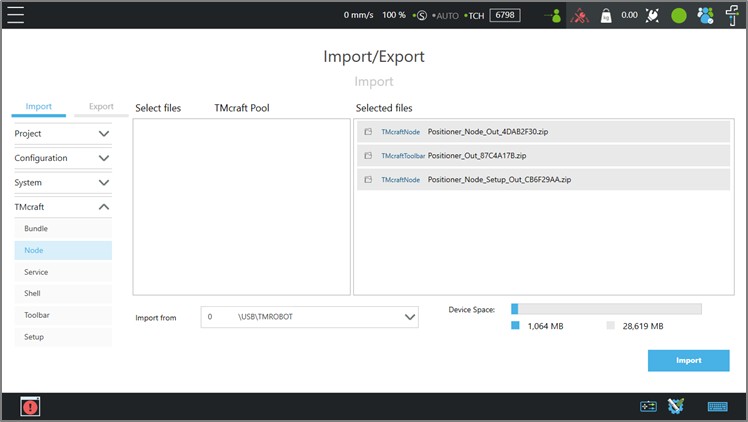
TMcraft 軟體包 - 到 Menu/Configuration/TMcraft Management, 啟用兩個node與一個toolbar。
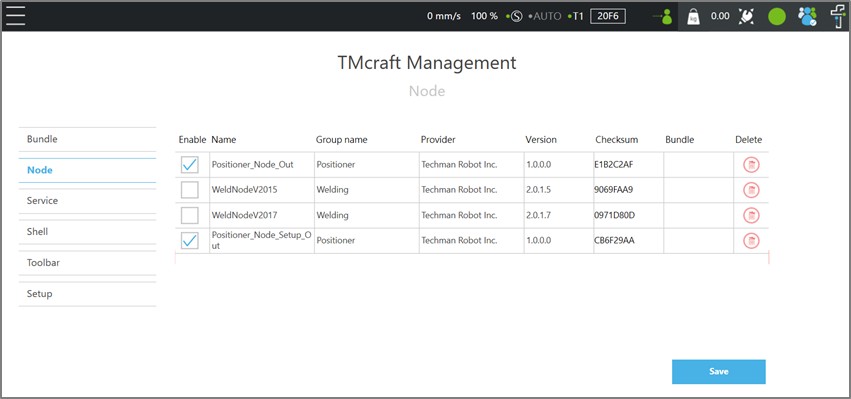
啟用 TMcraft Node/Toolbar - 完成後,應該看到下面的畫面 :
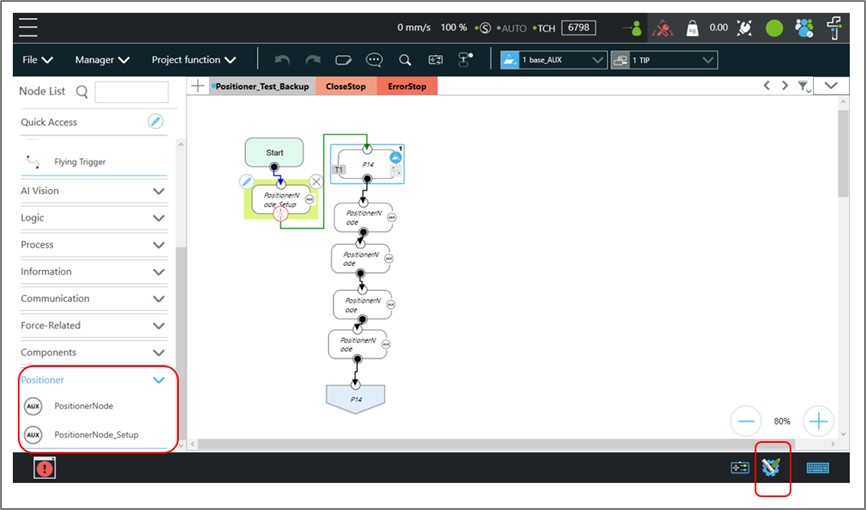
TMcraft 軟體包啟用成功
校正外部軸Calibrate for AUX #
- [伺服馬達驅動器上] 打開電源並確認驅動器上沒有任何錯誤碼。
- [在機器人上] 校正TCP。並確保該 TCP 已啟用。
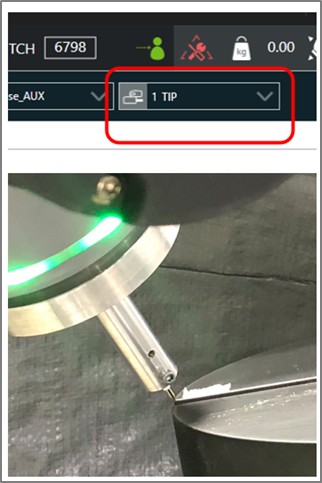
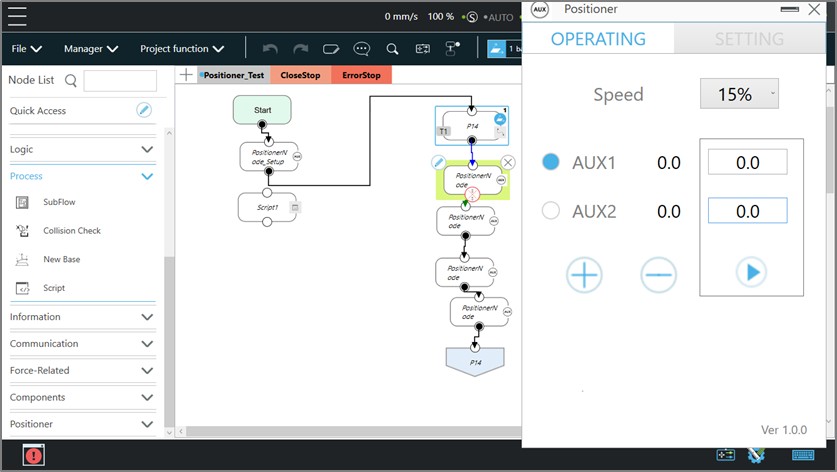
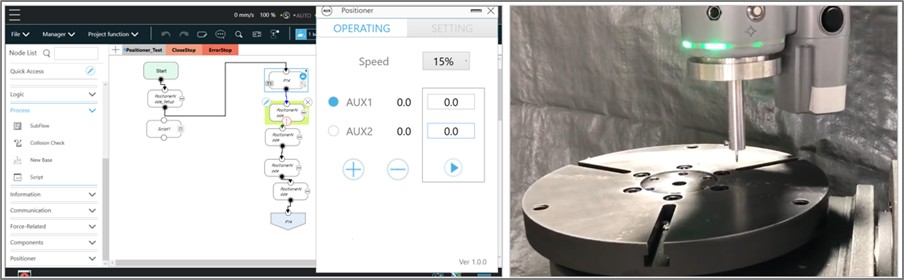
啟用正確的 TCP - 到Positioner toolbar,移動 [AUX1, AUX2] 到 [0, 0] 位置。按著PLAY圖示或+-來移動外部軸。
移動外部軸到原點 - 在轉盤(AUX2)的邊緣,以下是注意事項:
- 找個一個尖銳的參考點,方便後續肉眼去對齊。
- 如果是兩軸外部軸,圓周上任意點均可。
- 如果是一軸外部軸,參考點必須設定在+X軸的位置。
- 在參考點上作記號,方便後續校正流程參考。
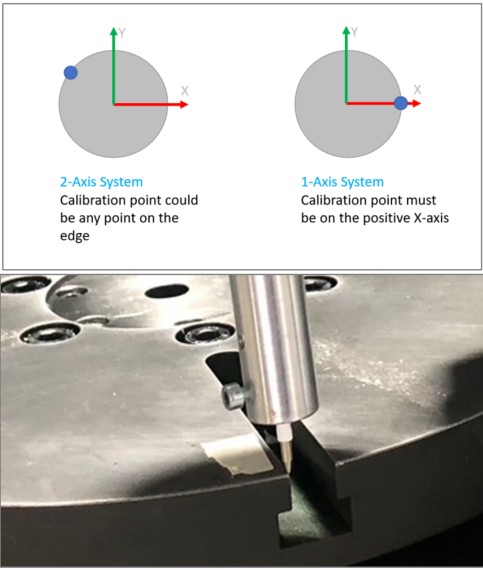
在外部軸上找到適合的參考點
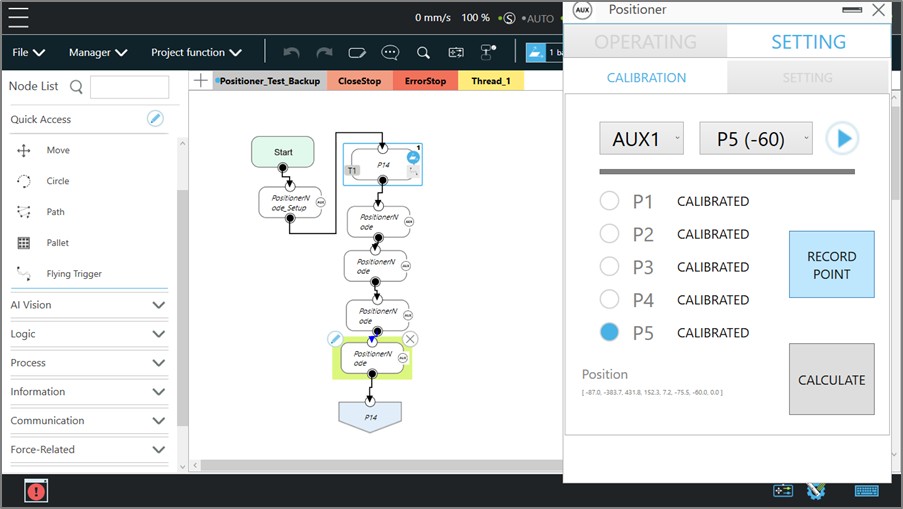
- 在 Positioner toolbar, 到 SETTING/CALIBRATION。選擇Select AUX1 與P1(0°)然後按著PLAY的圖示來移動外部軸到P1位置。
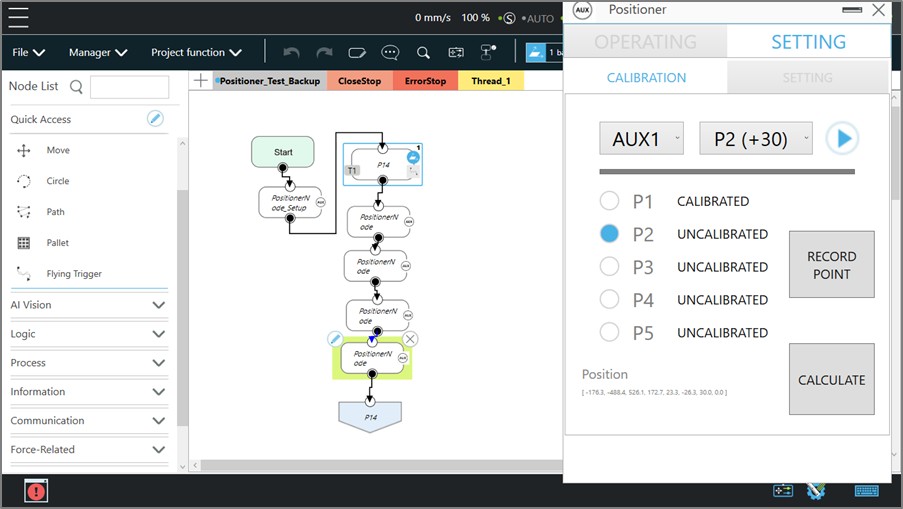
AUX1.P1 的校正畫面 - 將TCP移動到外部軸校正點。任何角度都可以。按下Record Point。接著會看到P1已經校正完成。
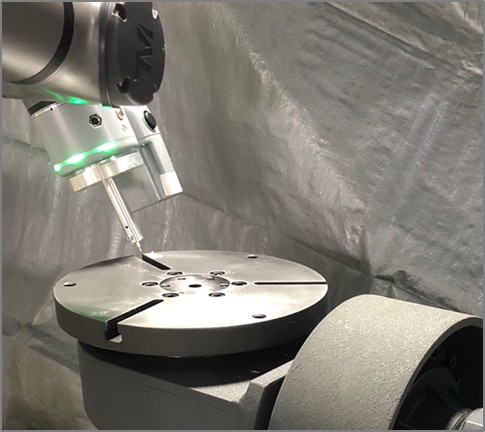
AUX1.P1 的校正位置 - Move the TCP away, then follow the same procedures to finish AUX1.P1 to AUX1.P5.
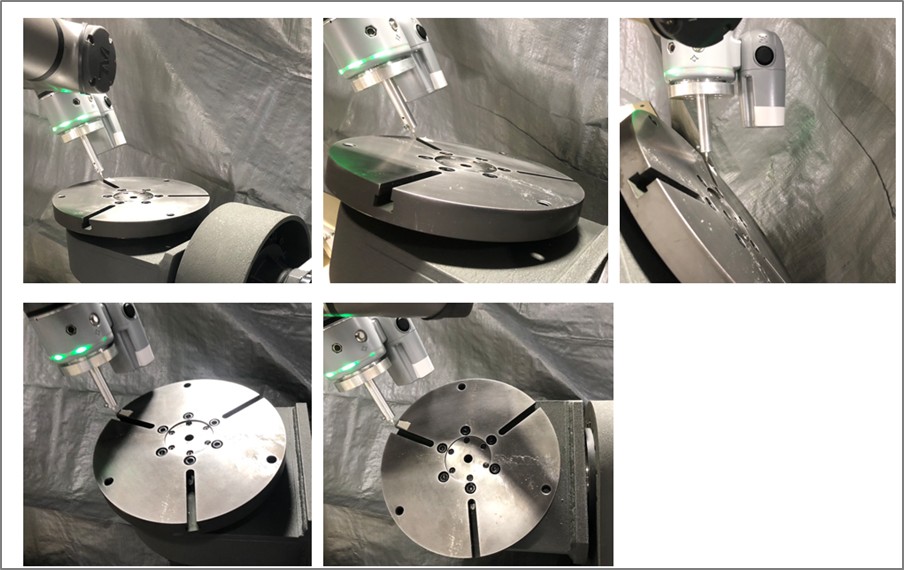
AUX.P1 到 AUX1.P5 的校正位置 - 將 AUX1 移到0°的位置。
- 在介面上選擇AUX2.P1(0°),然後按著 PLAY 來移動外部軸到P1。
- 將 TCP 移開,重複上面的步驟來完成AUX2.P1 到 AUX2.P5。
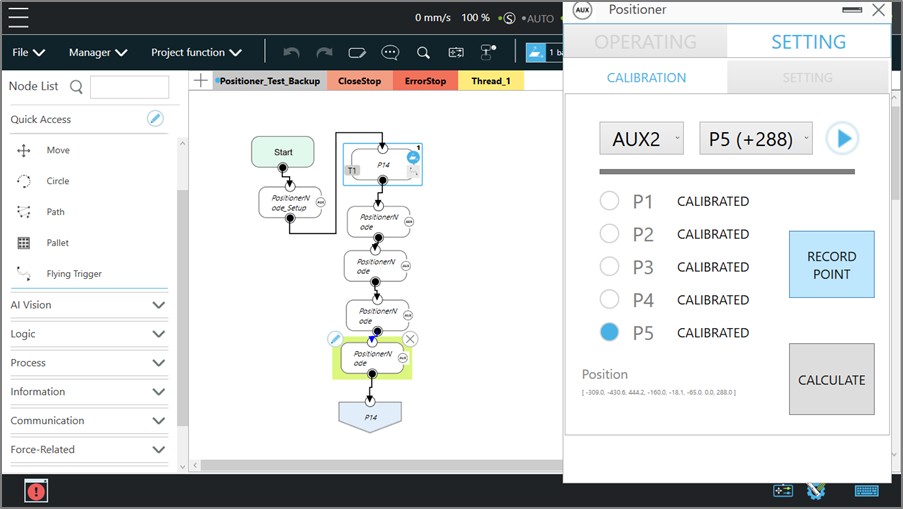
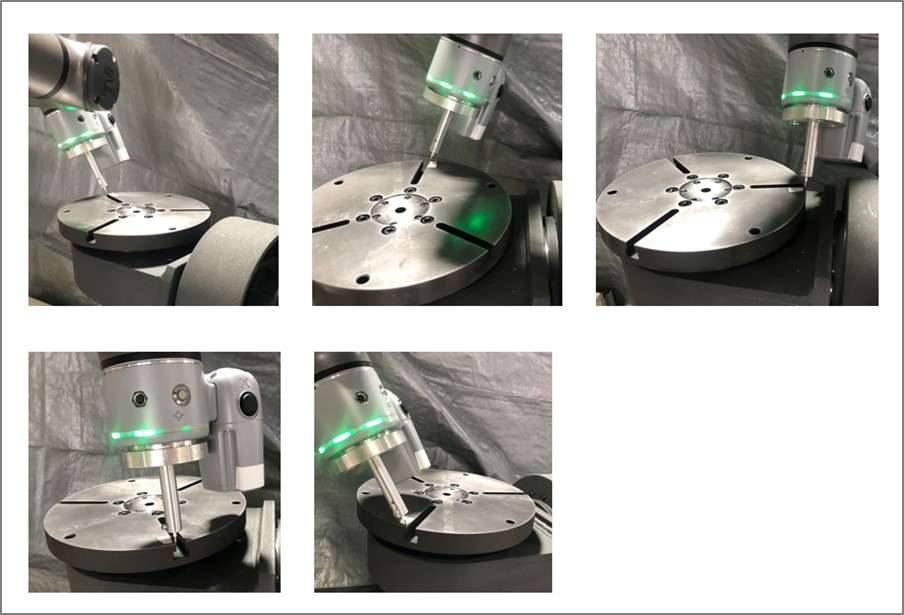
AUX2.P1 to AUX2.P5 的校正位置 - 界面上有預先設定好的角度:P1到P5,可以選擇。但可以依據現場情況來移動到不同角度並進行校正。校正時,盡可能包含所有運動的範圍,例如AUX2的 0° 到360°。
- 若只接一軸外部軸,則AUX2可以不用校正。
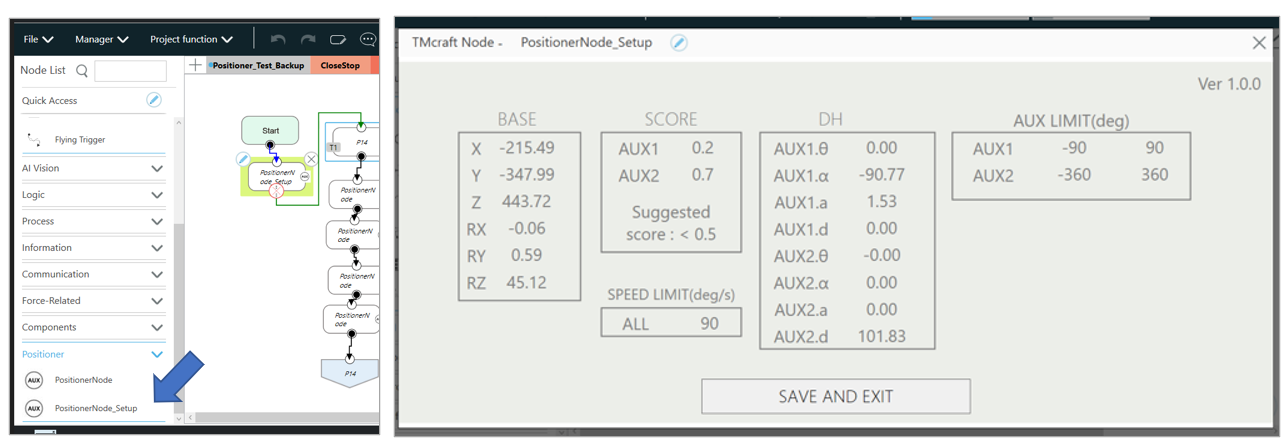
- 當所有點位都校正完成,按下CALCULATE 來完成校正並檢查校正結果。例如下圖,[0.3, 0.5] 分別代表AUX1與AUX2的分數。此分數越低越好,建議介於0.5以內。若超過此值則建議檢查TCP值與重新校正。
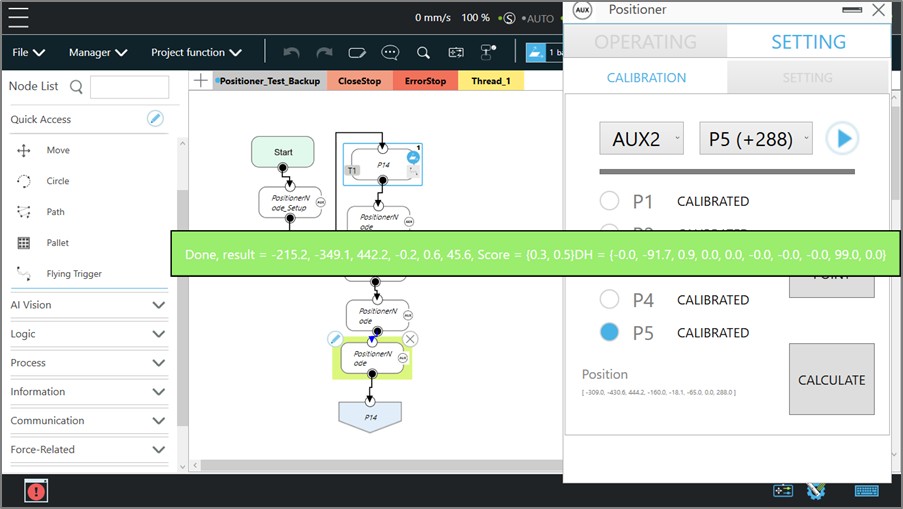
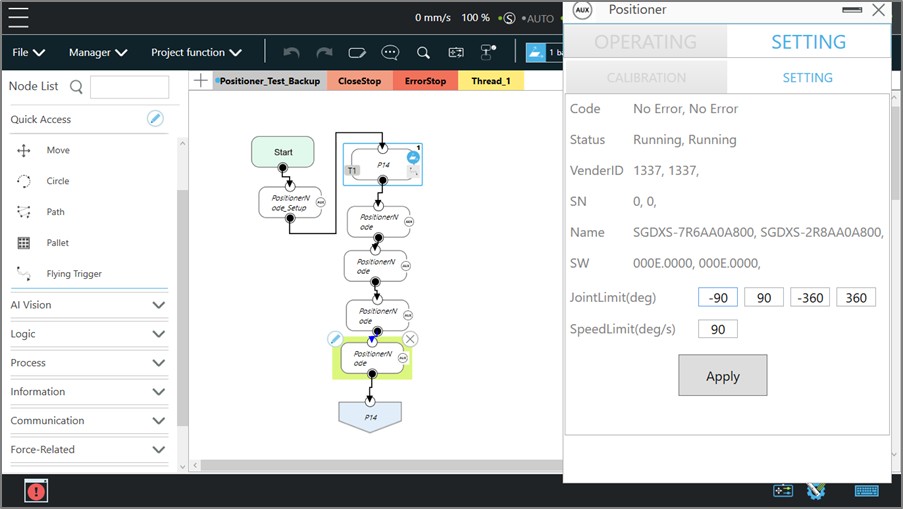
校正結果 - 到 SETTING/SETTING 去檢查外部軸狀態,或是修改相關參數。 按下Apply 來套用設定。這些設定可以之後隨時過來修改,立即生效。
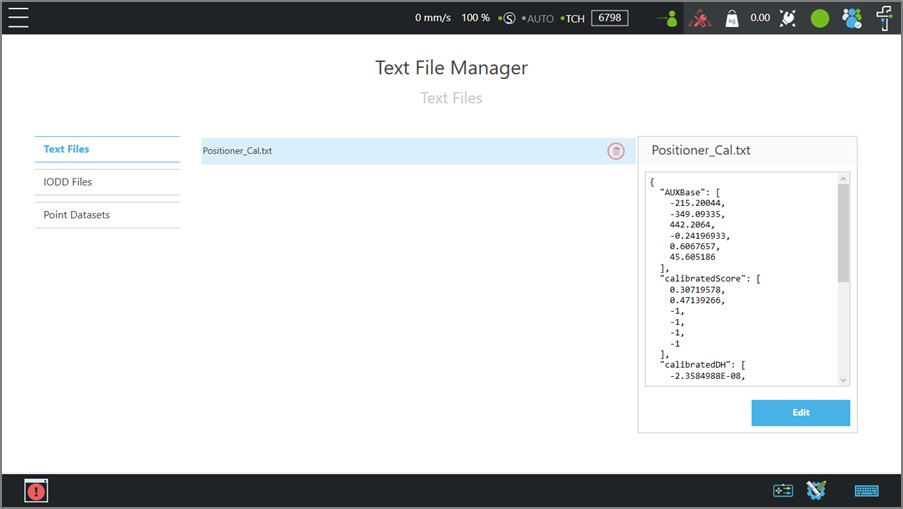
外部軸的設定頁面 - 當校正完成後,一個text檔案會自動產生在TMflow/Text File Manager/Positioner_Cal.txt。包含以下幾個參數與說明:
- 外部軸Base 的參考座標資訊(外部軸到機器人底座的相對座標關係)。
- DH 參數(描述AUX1與AUX2之間的相對關係。例如距離或組裝角度) 。
- 外部軸旋轉速度上限。
- 外部軸角度上下限。
- 若外部軸有移動或修改,則需要重新校正。
- 請勿移除此 text 檔案。
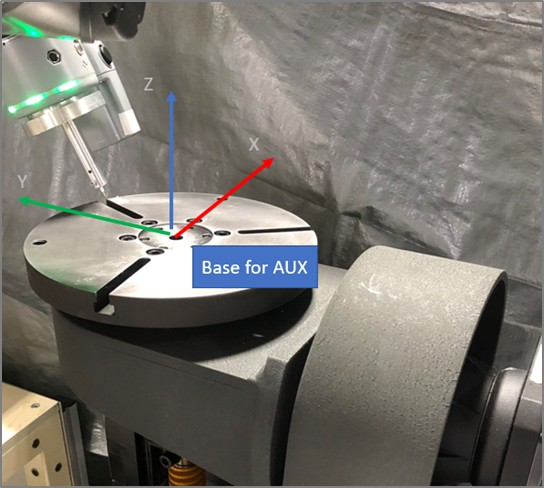
Base 校正 Calibration for Base #
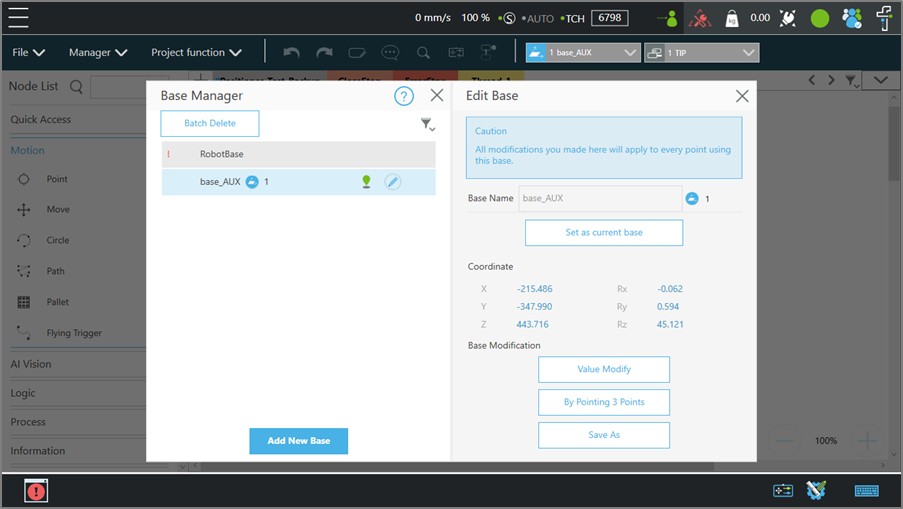
- 在TMflow專案中,創造一個Base。Positioner_Cal.txt/AUXBase 數值修改Base的座標數值 。
- 此Base代表:將參考座標系的原點放置到外部軸中心。
- 接下來,確保正確的Base與TCP有被啟用。
運動範例 #
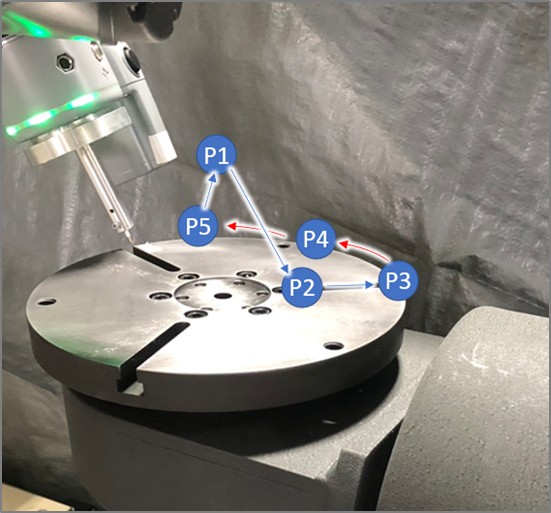
這裡是一段路徑的影片,我們接著會以此影片作為範例來講解。
- P1: 初始位置
- P2: 直線運動
- P3: 直線運動
- P4, P5: 圓弧運動
- P1: 初始位置
準備 #
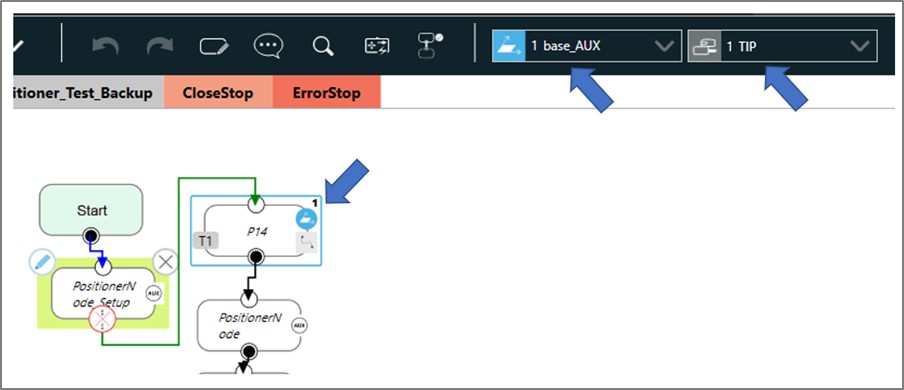
- 在 TMflow 程式開始的後面,使用一個 PositionNode_Setup 並進入該 node。前面做完的校正結果會自動顯示在本 node 內。第一次使用,必須按Save以保存結果。此步驟對於所有新的TMflow Project都是必要的。
PositionNode_Setup 範例 - 選擇正確的 Base 與 TCP。將手臂拉到P1的位置,然後使用一個 Point node 來確保 Base 與 TCP 會在此 node 之後被正確啟用。
移動外部軸並教點 #
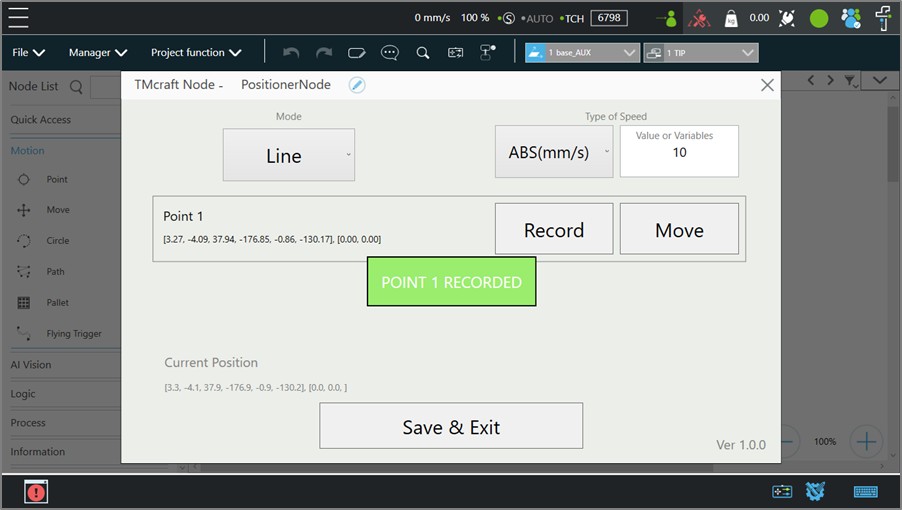
- 在 Positioner Toolbar 上將外部軸轉到希望的位置,例如[AUX1, AUX2] = [0, 0]。然後將TCP移動到P2位置。 然後在P1後插入一個PositionerNode。
P2 位置範例 - 在 PositionerNode 內,按下 Record 來紀錄目前的TCP與外部軸位置。然後按下 Save & Exit。
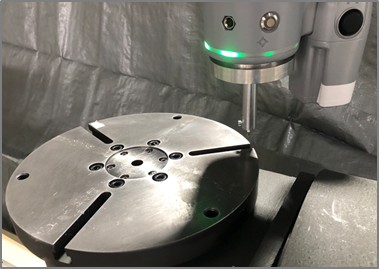
P2 位置範例 - 將TCP移開。移動外部軸到[-10, 20],然後將TCP移動到P3。插入一個新的 PositionerNode 並紀錄位置。
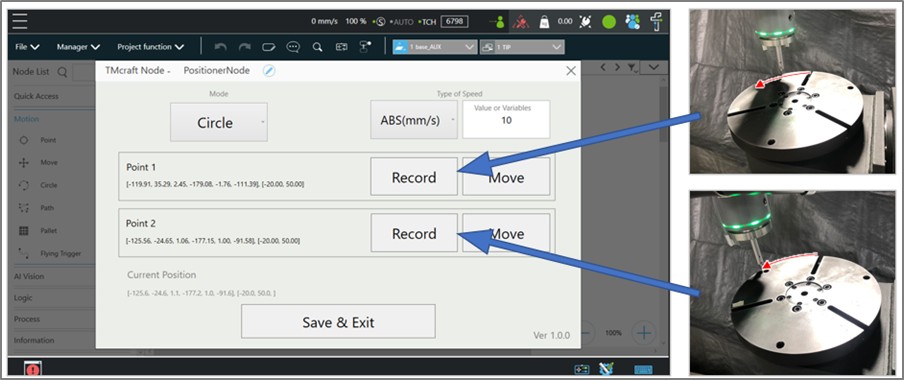
P3 位置範例 - 將TCP移開。移動外部軸到[-20, 50]。插入一個新的PositionerNode。這次在Mode上選擇Circle。 分別將TCP移到P4、P5並紀錄位置。這會在P3>P4>P5上紀錄圓弧路徑。
P4 與 P5 位置範例 - 插入 GOTO node 並指回到P1。
- 執行TMflow專案。您會看到 TCP 沿著指定路線移動,同時外部軸也進入同動模式。
注意事項 #
- 外部軸也可以使用 TMscript 來控制。例如下圖是將外部軸移動到指定位置。
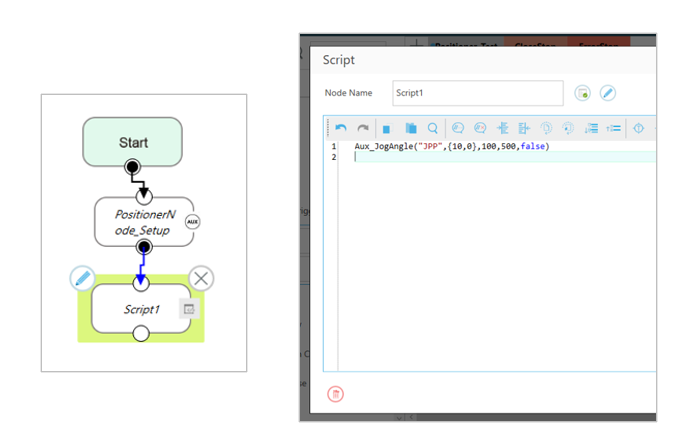
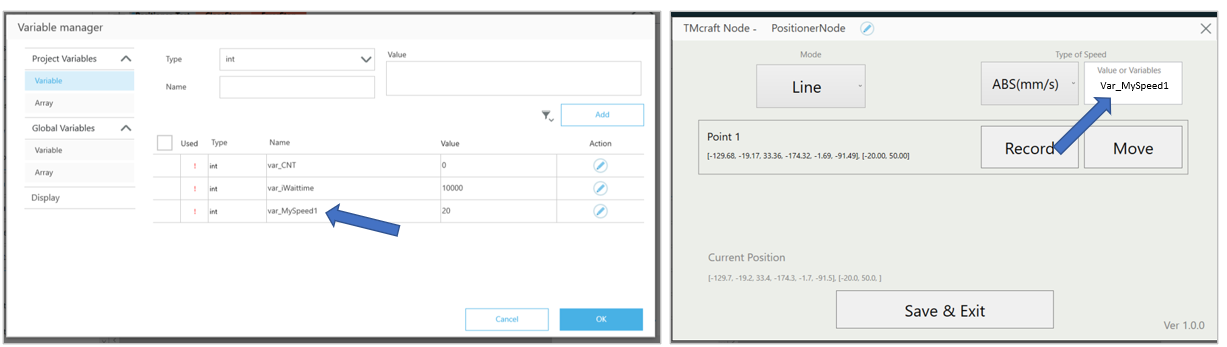
TMscript 的外部軸功能 - 要在 PositionerNode 修改速度,可以直接輸入整數(例如15mm/s)或是int變數,如下圖。
常見 Q&A #
我可以自行設計不同大小的外部軸?
可以。校正流程會自動去找出適合的參數。這些參數會保存在校正資料內(如DH)。
TM提供外部軸硬體嗎?
TM不提供。系統整合商必須自行設計與生產硬體。
可以使用其他品牌的伺服馬達系統嗎?
因為不同廠牌的伺服馬達特性不同,目前TM僅支援Yaskawa Sigma-X EtherCAT系列產品。其他品牌的產品目前正在研究中。未來可能可以支援。
TM支援橫移軸嗎?
橫移軸的功能正在開發中,目前尚未支援。
為什麼我的外部軸會有振動或雜音?
請依伺服馬達的使用手冊進行參數調整(tuning) 。


