TMflow software version: All versions.
TM Robot Hardware version:All versions
Other specific requirements: None
Note that older or newer software versions may have different results.
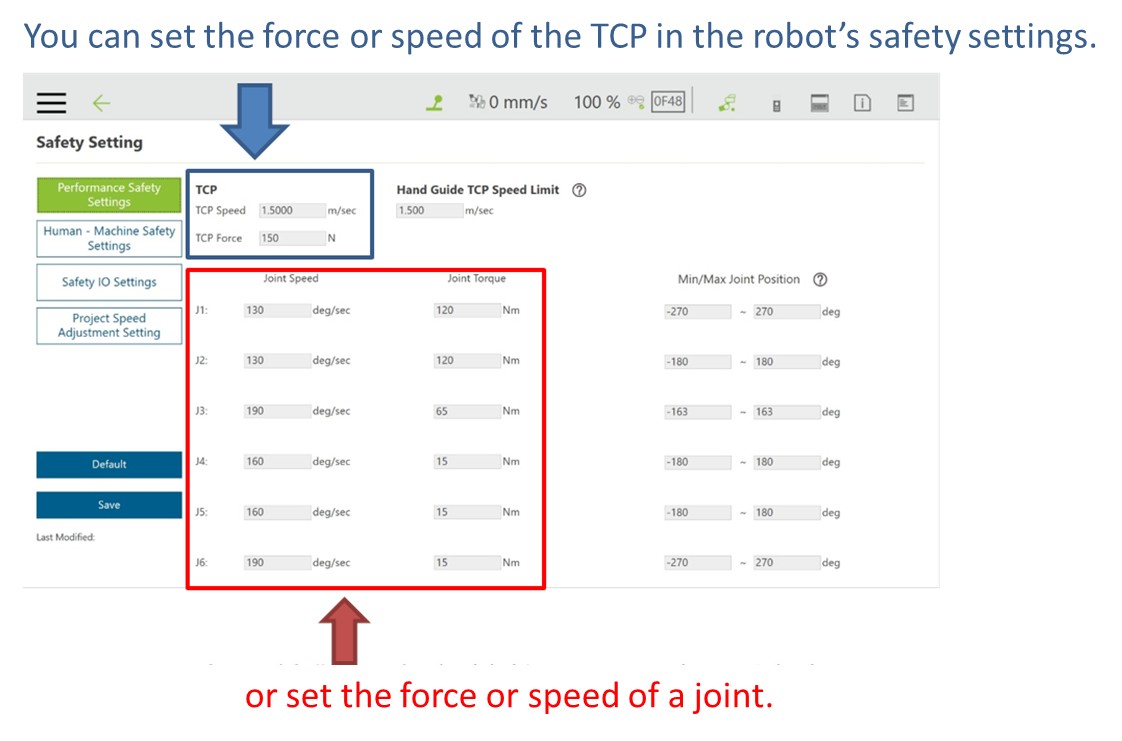
Go to Setting > Safety and Set a Robot’s Force or Speed #
Scenarios and Purposes #
- If your end-of-arm tool is a sharp or dangerous device (e.g., a screwdriver or cutting tool), you can decrease TCP speed to reduce the risk of the robot injuring human operators.
- If there is a need for a human operator and the robot to work together at a close distance, you can set TCP Force in ways that allow you to effectively check whether the end-of-arm tool will collide with the operator.
- When the robot is manipulated to apply extra force (such as pushing, pressing, or pulling), some joints apply more force than normal and their torque must be adjusted.


