Examples are valid for: TMflow Software version: 1.76.6300 or above. TM Robot Hardware version: All versions. Note that older or newer software versions may have different results.
Singularity Point #
The motion of an articulated robot is often limited by the kinematic design, and cannot perform Cartesian motion control under all joint positions. The joint position that will cause the robot to be unable to perform Cartesian control is a singularity point. When the robot encounters a singularity point, it will stop motion and initiate a warning.
Three types of singularity point for TM Robot:
- Internal Singularity Point in Space
- Extensible Singularity Point in Space.
- Wrist Singularity Point in Space.
Internal Singularity Point in Space: #
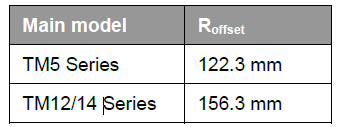
The distance from the intersection of the rotational axes of the fifth joint and the sixth joint to the extended line of the rotational axis of the first joint is defined as Roffset. The cylindrical space that is formed by Roffset as the radius and centered on the extended line of the rotational axis of the first joint is the Internal Singularity Point in Space. As soon as the robotic arm approaches the Internal Singularity Point in Space, the arm will stop and issue a warning. The Roffset values of each product series are shown in the following table:

Extensible Singularity Point in Space: #
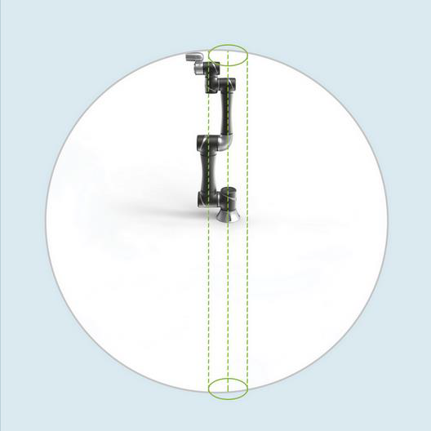
- When the third joint is almost at its zero degree, which means the robot is almost at the maximum working radius. The space exceeding this radius is the Extensible Singularity Point in Space. In this space, the robot will stop and report a warning due to exceeding the motion range of the robot.
- The maximum working range can be achieved when the third joint is almost at zero degrees
Wrist Singularity Point in Space: #
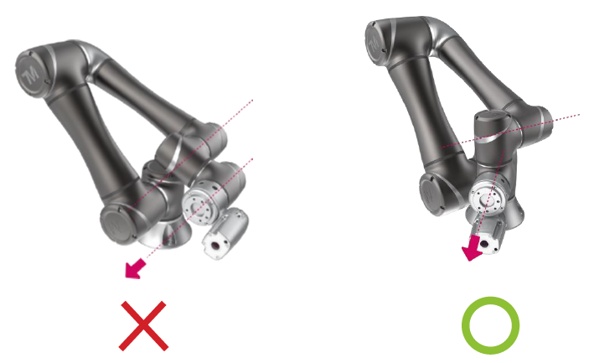
- When the rotational axes of the fourth and the sixth joints are parallel, the robot will enter the Wrist Singularity Point in Space. At this time, the motion of the arm will cause a large-angle displacement of the fourth joint, but it will be stopped due to stop criteria of motion speed. Once the robot enters the Wrist Singularity Point in Space, it will stop and report an error.
- When the fourth and sixth joint are nearly parallel, the robot is about to enter the Wrist Singularity Point in Space.

The Solution when Encountering Singularity Point in Space #
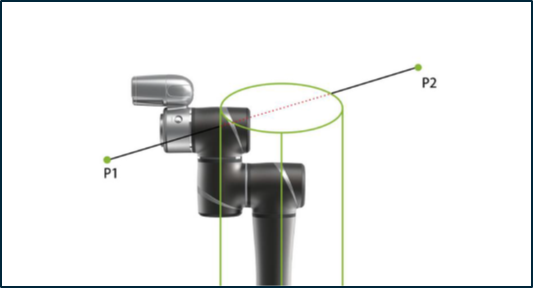
When the robot reports singularity, confirm the posture of the robot. If the tool end path crosses the internal cylinder as shown in the figure below, check the first point description. If the rotational axes of the fourth and sixth joints of the robot are parallel, check the second point description below.
1.When the arm reports a warning due to the Internal Singularity Point in Space, press the FREE button to release it from the posture. Change the point position or change the motion type to PTP between the points to avoid the arm path between the points crossing the Internal Singularity Point in Space, as shown in the figure below.
2.When the robot reports a warning because of entering the Wrist Singularity Point in Space, press the FREE button to release it. When the rotational axes of the fourth and the sixth joint are in parallel, if users still try to perform Cartesian motion, the Wrist Singularity Point in Space will be encountered. At this time, the method in the following figure can be used to avoid the rotational axes of the fourth and the sixth joints being parallel.