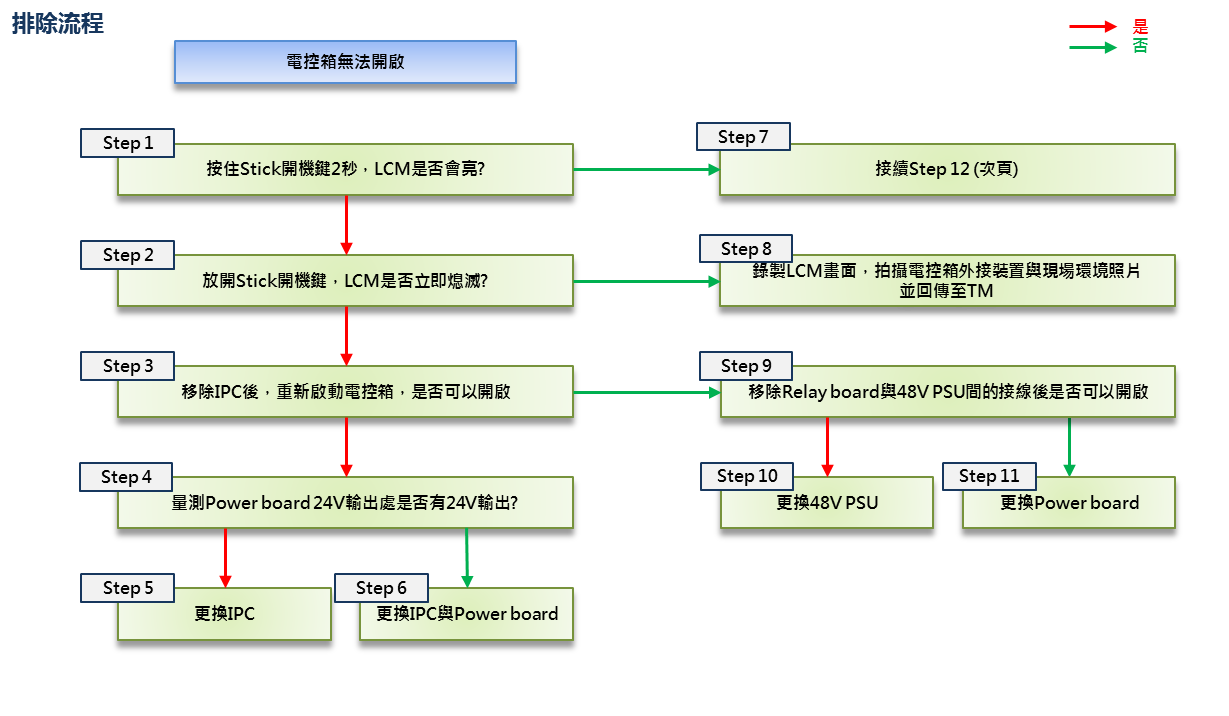
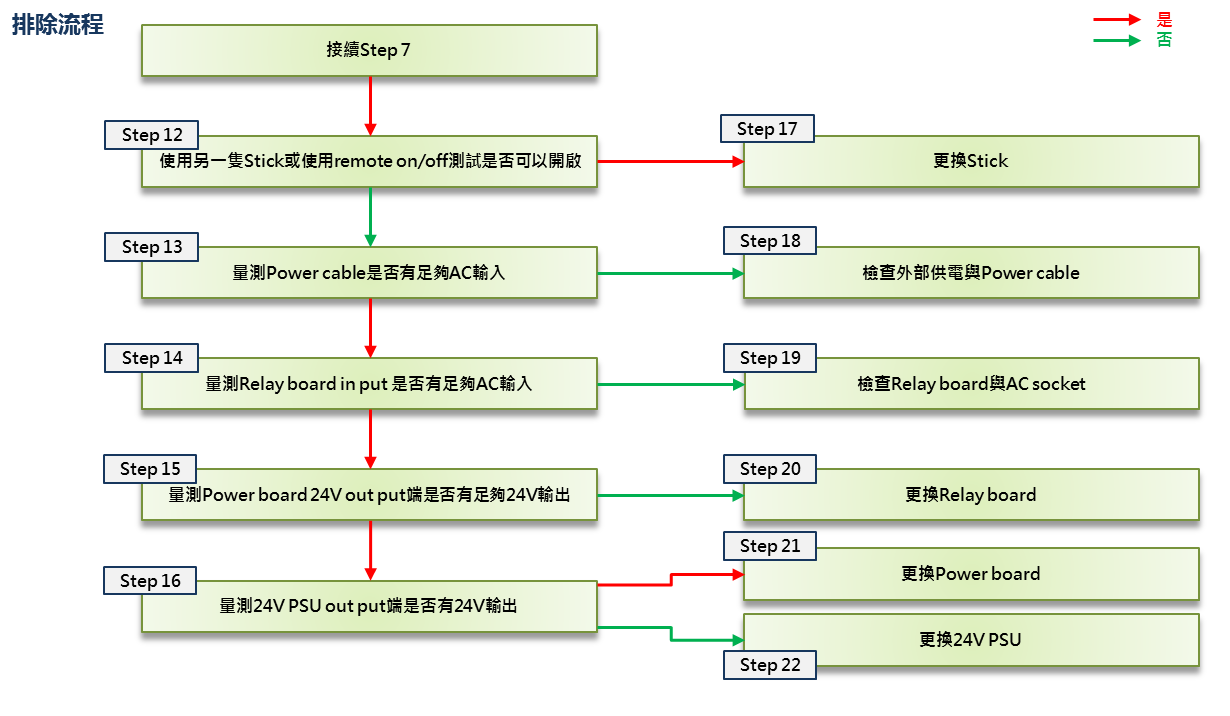
電控箱無法開機 #
| 案件描述: | 本節介紹電控箱啟動期間可能出現的故障以及每種故障的建議操作。 | |
| 發生結果: | 按下控制棒上的開機鍵後,電控箱無開機反應,LCM沒有畫面。 | |
| 可能原因: | 以下是電控箱無法開機的可能症狀:
1)AC無電源或電源線損壞 2)電源線鬆脫 3)AC電源輸入至Relay board的接線鬆脫 4)Relay Board上的元件燒毀 5)控制棒或IPC損壞 6)power supply 24V 損壞 |
常見故障碼:
NA |
| 症狀現象圖: |  |
|
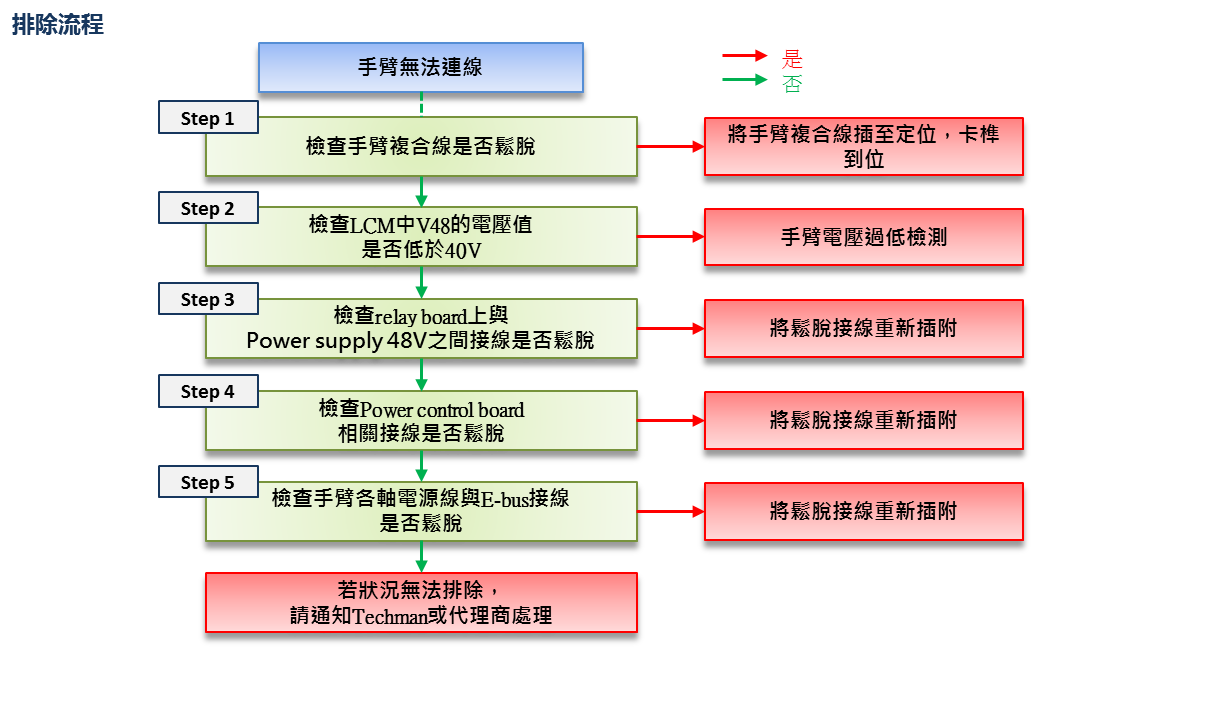
手臂連線異常 #
| 案件描述: | 本節介紹當手臂無法連線電控箱時,可能出現的故障以及每種故障的建議操作。 | ||
| 發生結果: | HMI系統無法進入,手臂末端無亮燈,系統錯誤報告顯示Error Code 0x3C、3B、4B。 | ||
| 可能原因: | 以下是手臂連線異常的可能症狀:
1)手臂複合線鬆脫 2)手臂電壓過低 (依照“3. 手臂電壓異常”進行檢測) 3)relay board上與Power supply 48V之間接線鬆脫 4)Power control board相關接線鬆脫 5)手臂各軸電源線與E-bus接線鬆脫 6)存取電源控制板記憶體失敗(電源控制板 failed) 7)Joint的電源控制板故障 |
常見故障碼:
0x0000003B 0x0000003C 0x0000004B 0x0000004C 0x0000004E 0x0000004F 0x00000050 |
0x00000057
0x0000005E 0x0000FFE4 0x0000FFAF 0x00041005 |
| 症狀現象圖: |  |
||
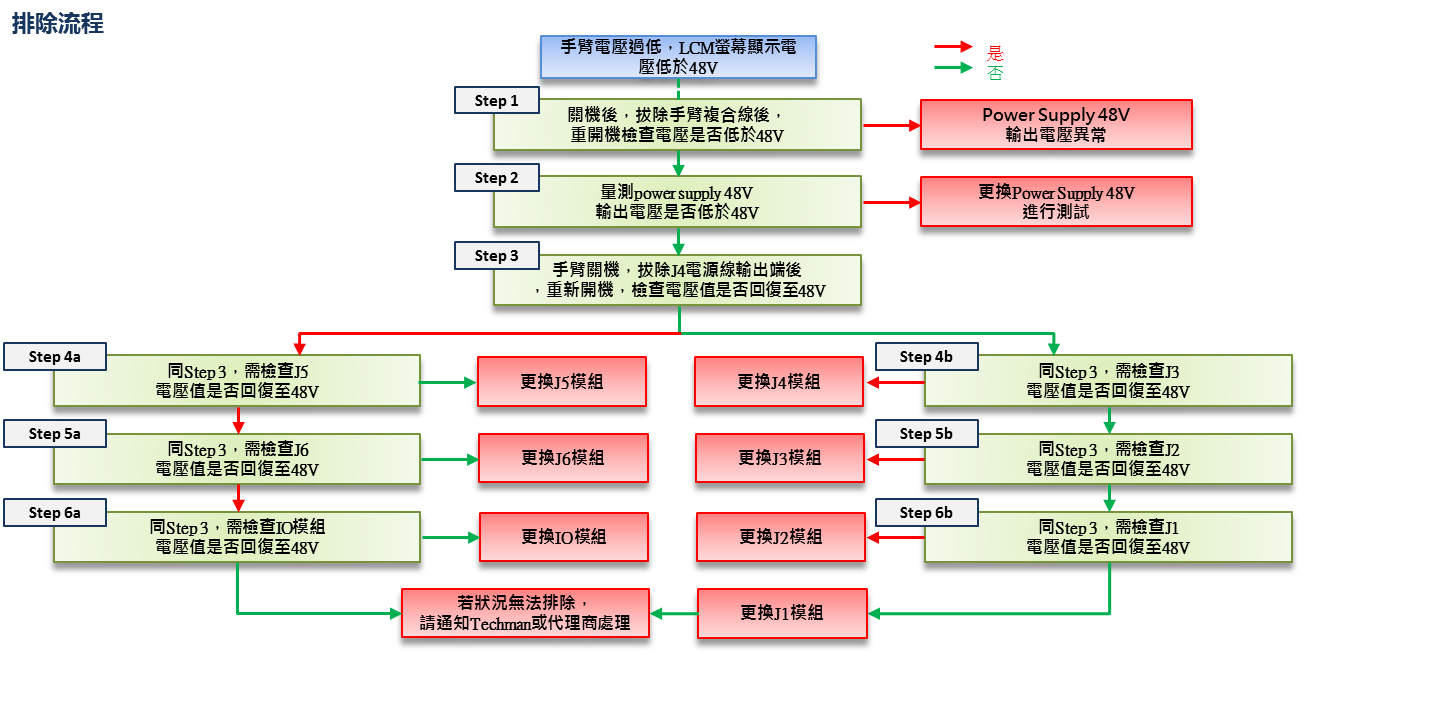
手臂電壓異常 #
| 案件描述: | 本節介紹當手臂電壓過低時,可能出現的故障以及每種故障的建議操作。 | |
| 發生結果: | HMI系統無法進入,手臂末端無亮燈,LCM 48V電壓值明顯壓降至40V以下,Error code 顯示 3C、3E。 | |
| 可能原因: | 以下是手臂電壓異常的可能症狀:
1)Power supply 48V輸出電壓異常 2)Joint 1模組異常 3)Joint 2模組異常 4)Joint 3模組異常 5)Joint 4模組異常 6)Joint 5模組異常 7)Joint 6模組異常 8)IO 模組異常 |
常見故障碼:
0x00000035 0x0000003C 0x0000003E 0x00000053 |
| 症狀現象圖: | 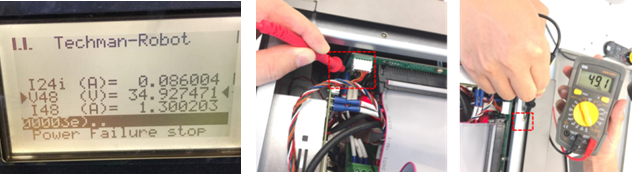 |
|
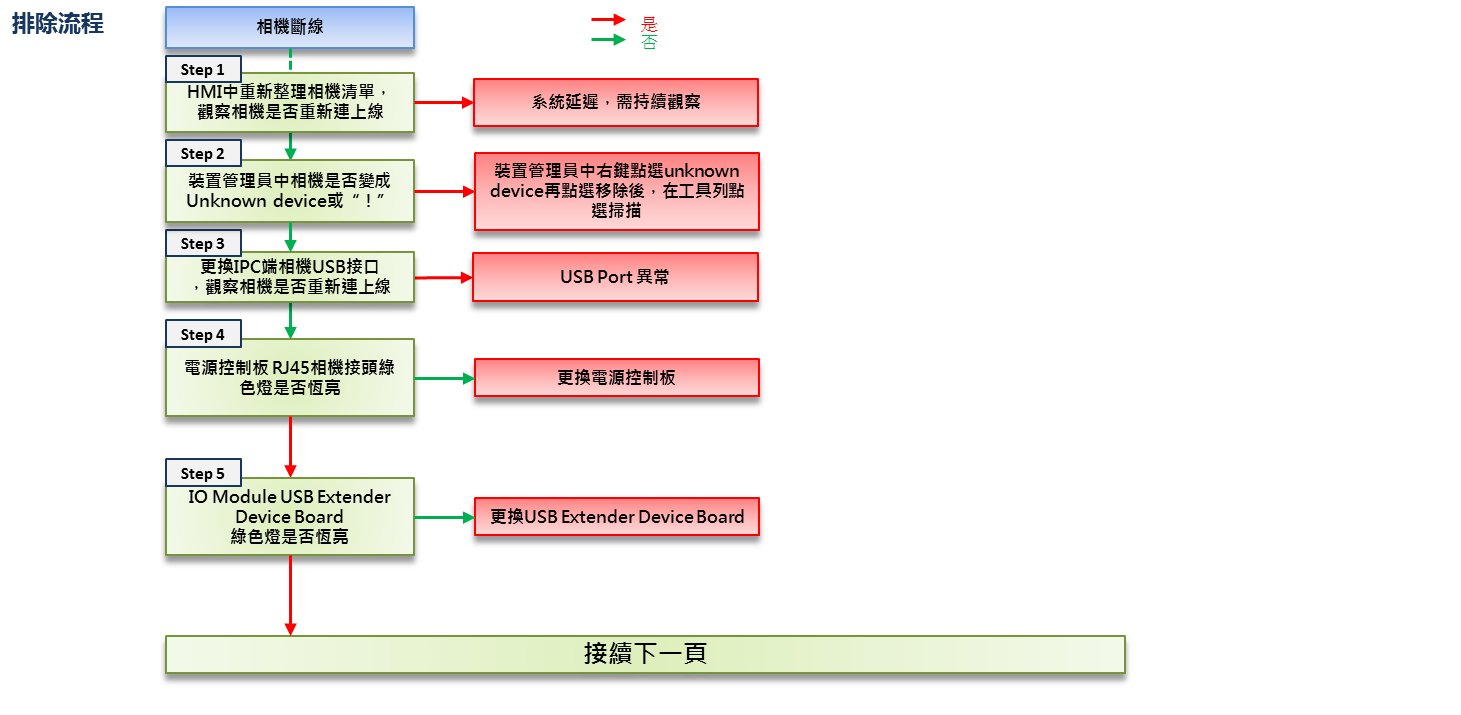
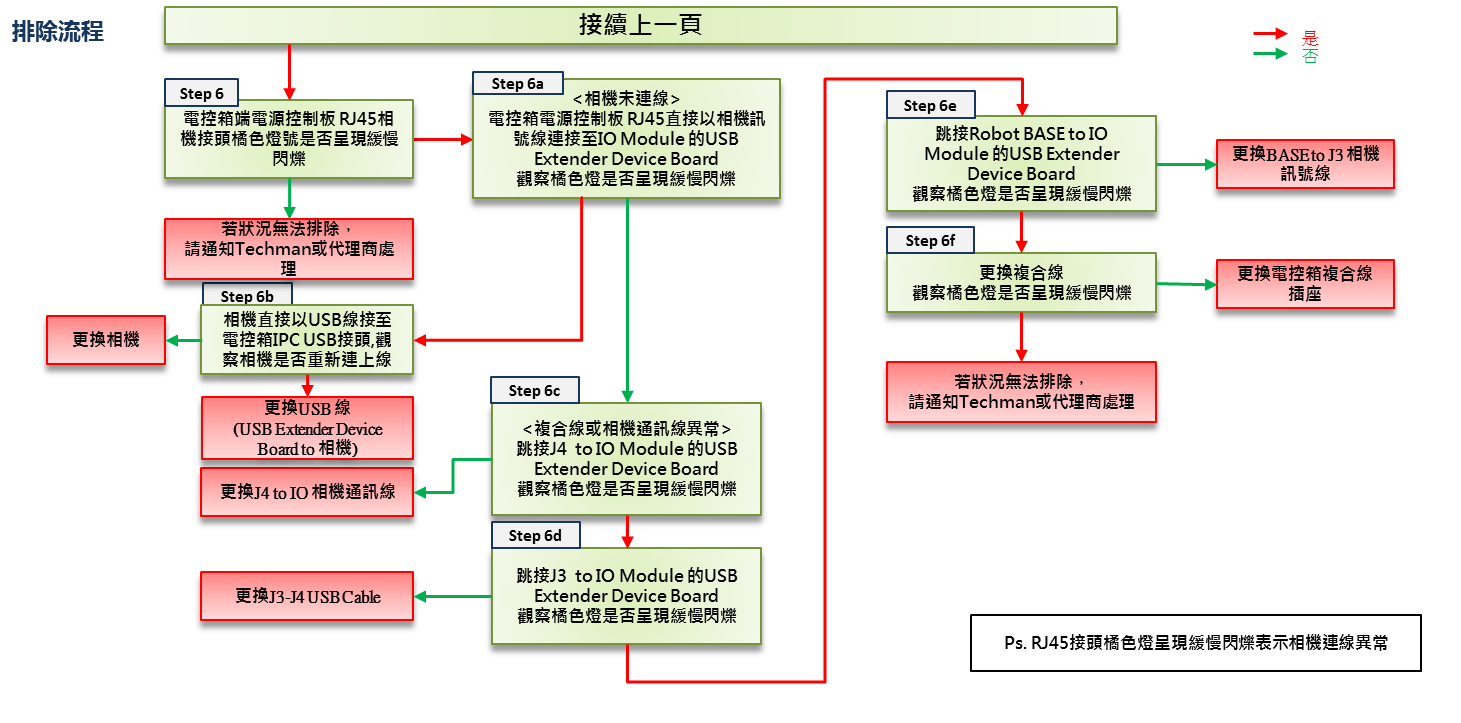
相機連線異常 #
| 案件描述: | 本節介紹當相機斷線時,可能出現的故障以及每種故障的建議操作。 | |
| 發生結果: | 當待機以及操作視覺任務時,系統顯示相機連線異常或視覺設定的相機清單中,EIH相機項目消失。 | |
| 可能原因: | 以下是相機連線異常的可能症狀:
1)系統延遲 2)相機異常 3)IPC中USB Port異常 4)J1-J3的usb cable異常 5)J3-J4的usb cable異常 6)J4~IO模組的usb cable異常 7)Coupler Board異常 8)手臂複合線異常 9)電控箱內部USB接線異常 |
常見故障碼:
0x00020000 0x00020007 |
| 症狀現象圖: |  |
|
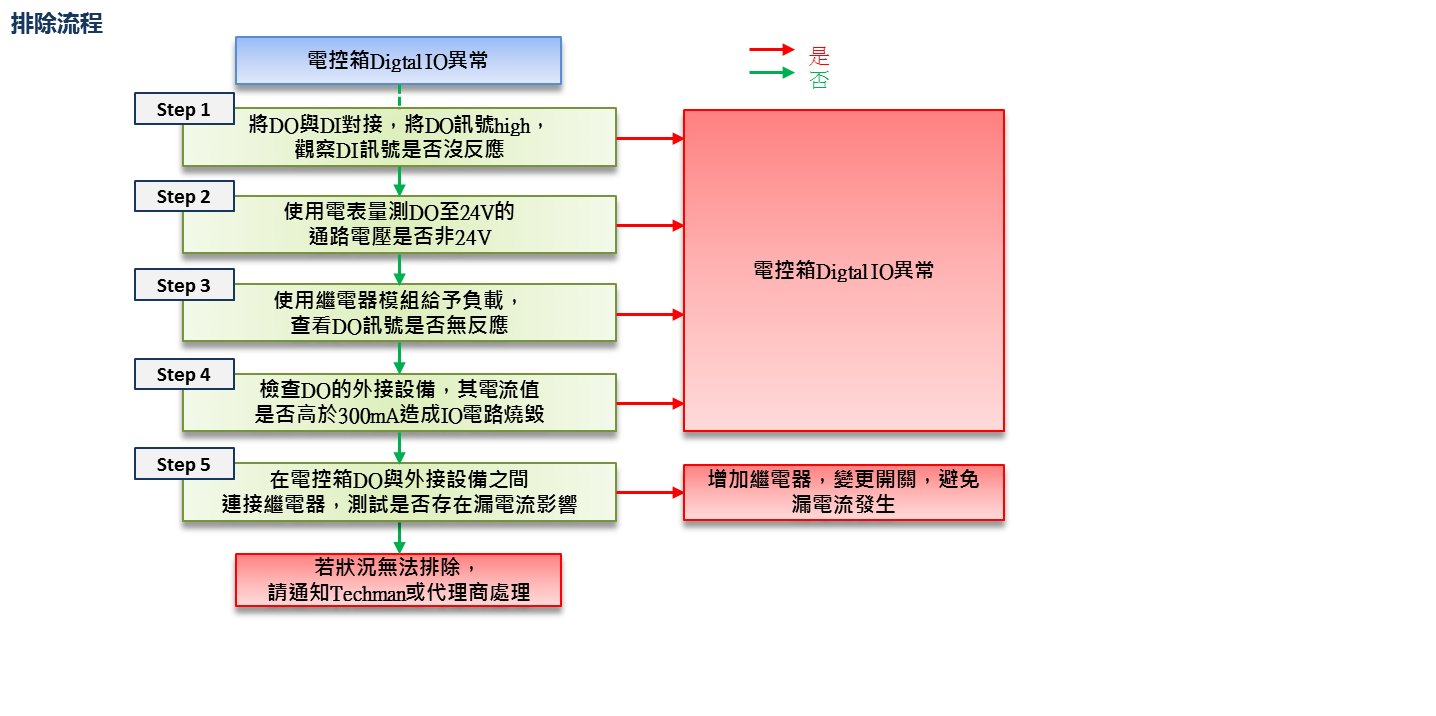
電控箱Digital IO異常 #
| 案件描述: | 本節介紹當電控箱Digtal IO異常時,可能出現的故障以及每種故障的建議操作。 | |
| 發生結果: | 電控箱DO訊號輸出發生訊號延遲或無反應。 | |
| 可能原因: | 以下是電控箱無法開機的可能症狀:
1)DO的外接設備,其電流值高於100mA造成IO電路燒毀 2)電控箱IO連接外接設備的電路之間存在漏電流影響 每個通道的最大驅動電流 :TM5 ->100mA & TM5A/TMAA -> 300mA 。如果負載超過最大驅動電流 ,應使用繼電器來驅動它 |
常見故障碼:
NA |
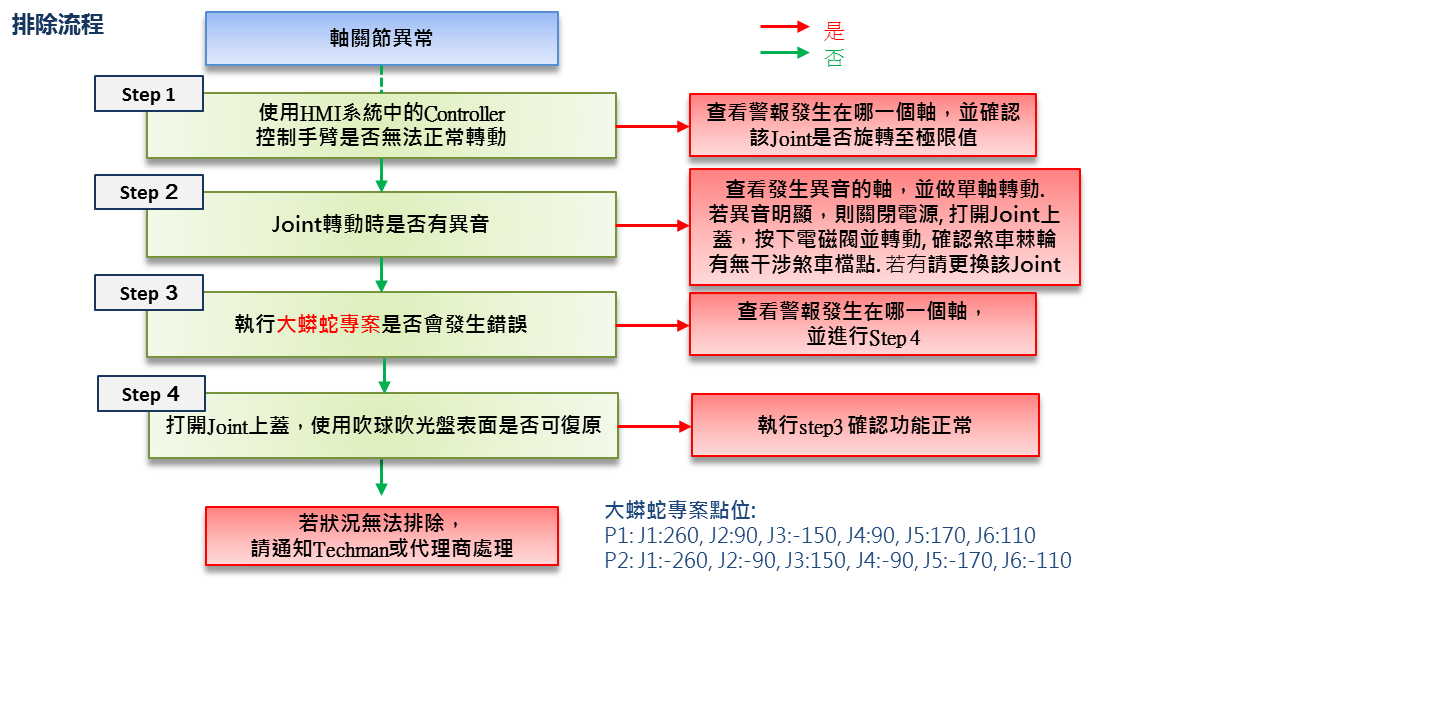
軸關節異常 #
| 案件描述: | 本節介紹當軸關節異常時,可能出現的故障以及每種故障的建議操作。 | ||||
| 發生結果: | 1.報軸關節相關錯誤,無法控制手臂。
2.Joint內部機構件異常,導致當軸無法轉動。 3.手臂轉動時,發出異音。 |
4.編碼器分辨率過高,提高運行速度報0x0000FFED。
5.專案後啟動一段時間後報0x0000FF05直到速度降低速度。 |
|||
| 可能原因: | 以下是電控箱無法開機的可能症狀:
1)Joint旋轉至極限值 2)Joint內部機構件異常 |
常見故障碼:
0x00000035 0x0000003C 0x0000004B 0x0000FF01 0x0000FF02 0x0000FF04 0x0000FF05 0x0000FF06 0x0000FF07 0x0000FF08 |
0x0000FF09
0x0000FF0A 0x0000FF0B 0x0000FF0C 0x0000FF0D 0x0000FF0E 0x0000FF0F 0x0000FF10 0x0000FF11 0x0000FF12 |
0x0000FF13
0x0000FF14 0x0000FF15 0x0000FF16 0x0000FF17 0x0000FFAB 0x0000FFCF 0x0000FFED 0x00000019 |
|
| 症狀現象圖: | 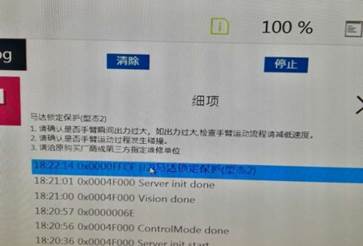 |
||||
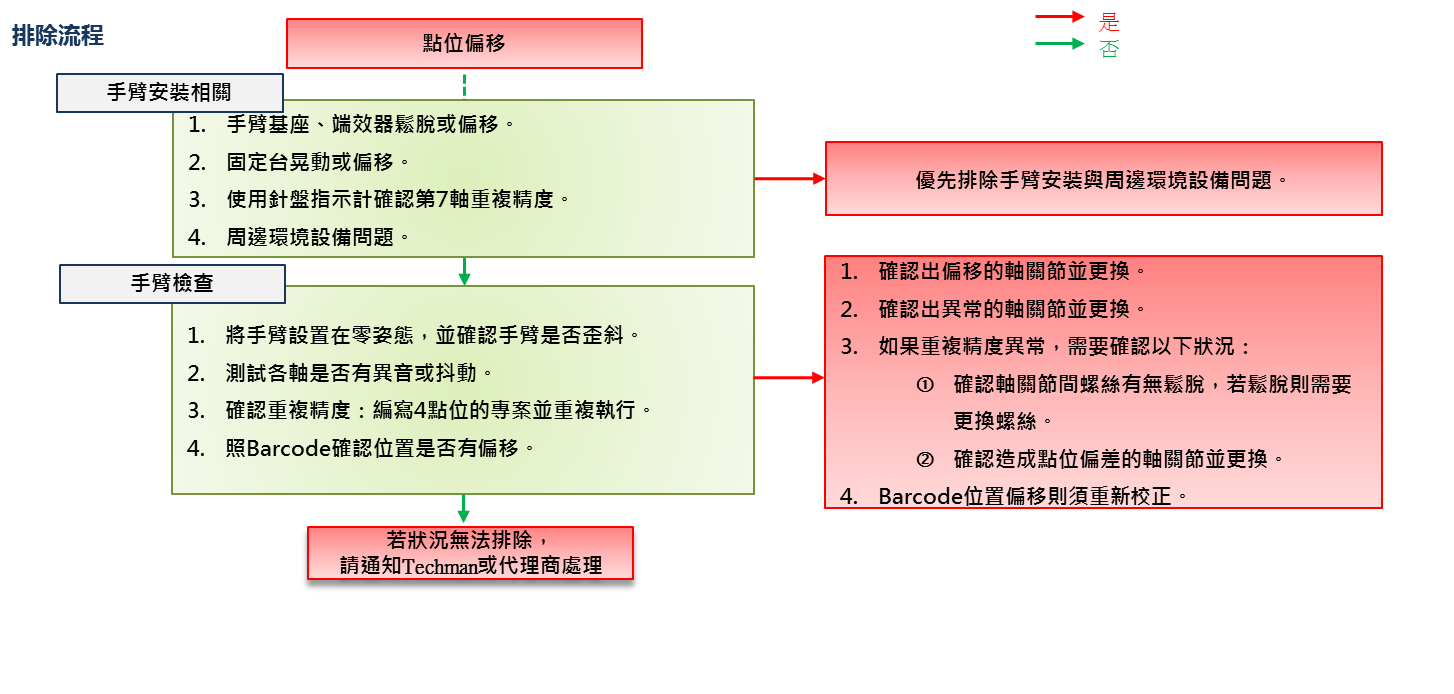
點位偏移 #
| 案件描述: | 本節介紹當點位偏移時,可能出現的故障以及每種故障的建議操作。 | |
| 發生結果: | 當手臂撞機後,造成專案中的執行點位偏移。 | |
| 可能原因: | 以下是電控箱無法開機的可能症狀:
1)手臂調整至零姿態,檢查手臂明顯歪斜 2)軸連接處pin點偏移 3)手臂未鎖緊於平台上或鎖附平台搖晃 4)工作平台因撞擊而移位 |
常見故障碼:
NA |
控制棒異常 #
| 案件描述: | 本節介紹當控制棒異常時,可能出現的故障以及每種故障的建議操作。 | |
| 發生結果: | 1.專案執行時,會不定時的暫停或是自動手動模式自動切換。
2.專案執行時,會自動進入Emergency模式。 3.按鍵無反應。 4.手臂無法開機。 |
|
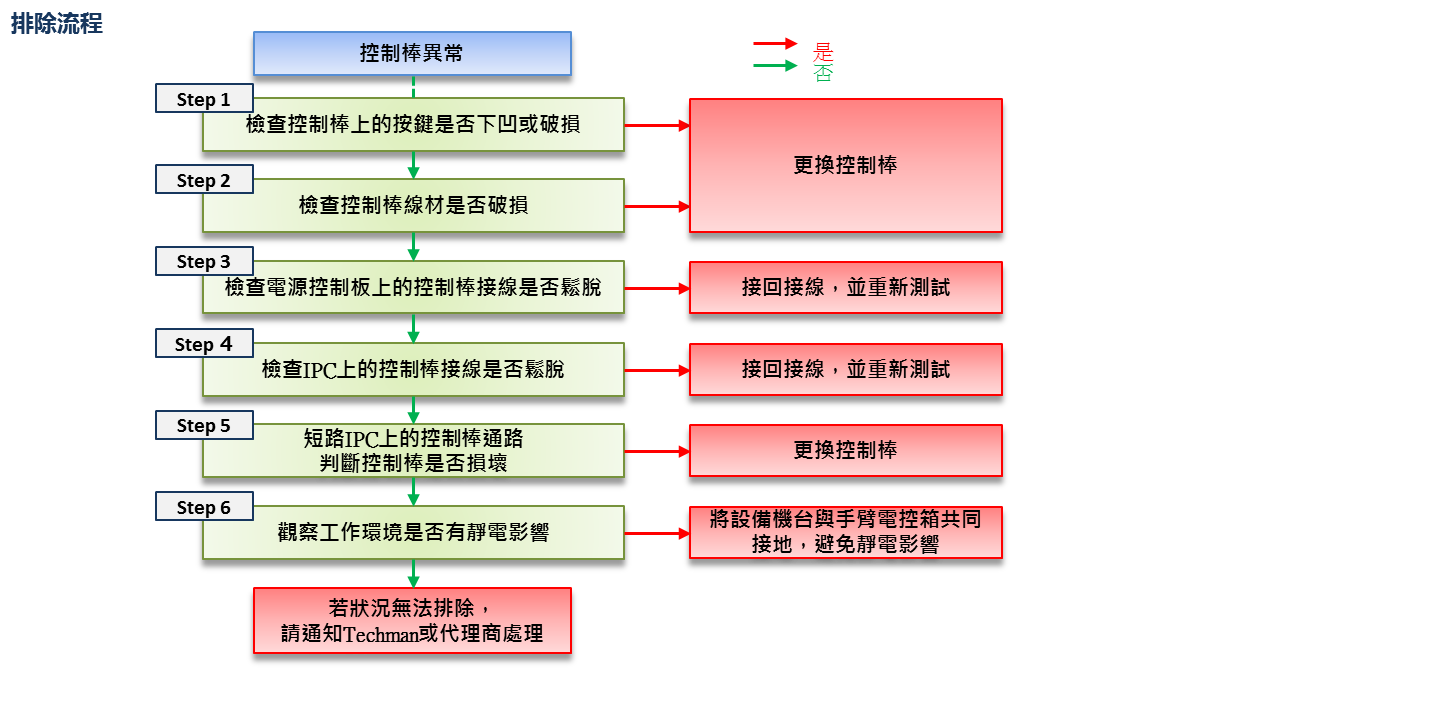
| 可能原因: | 以下是控制棒異常的可能症狀:
1)控制棒上的按鍵下凹或破損 2)控制棒線材破損 3)電源控制板上的控制棒接線鬆脫 4)IPC上的控制棒接線是否鬆脫 5)工作環境有靜電影響 |
常見故障碼:
NA |
| 症狀現象圖: | 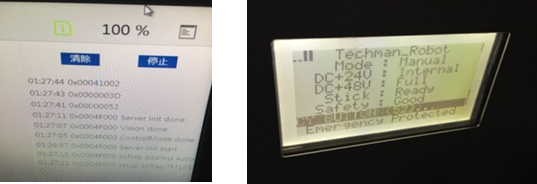 |
|
外接設備連線異常 #
| 案件描述: | 本節介紹當外接設備連線異常時,可能出現的故障以及每種故障的建議操作。 | |
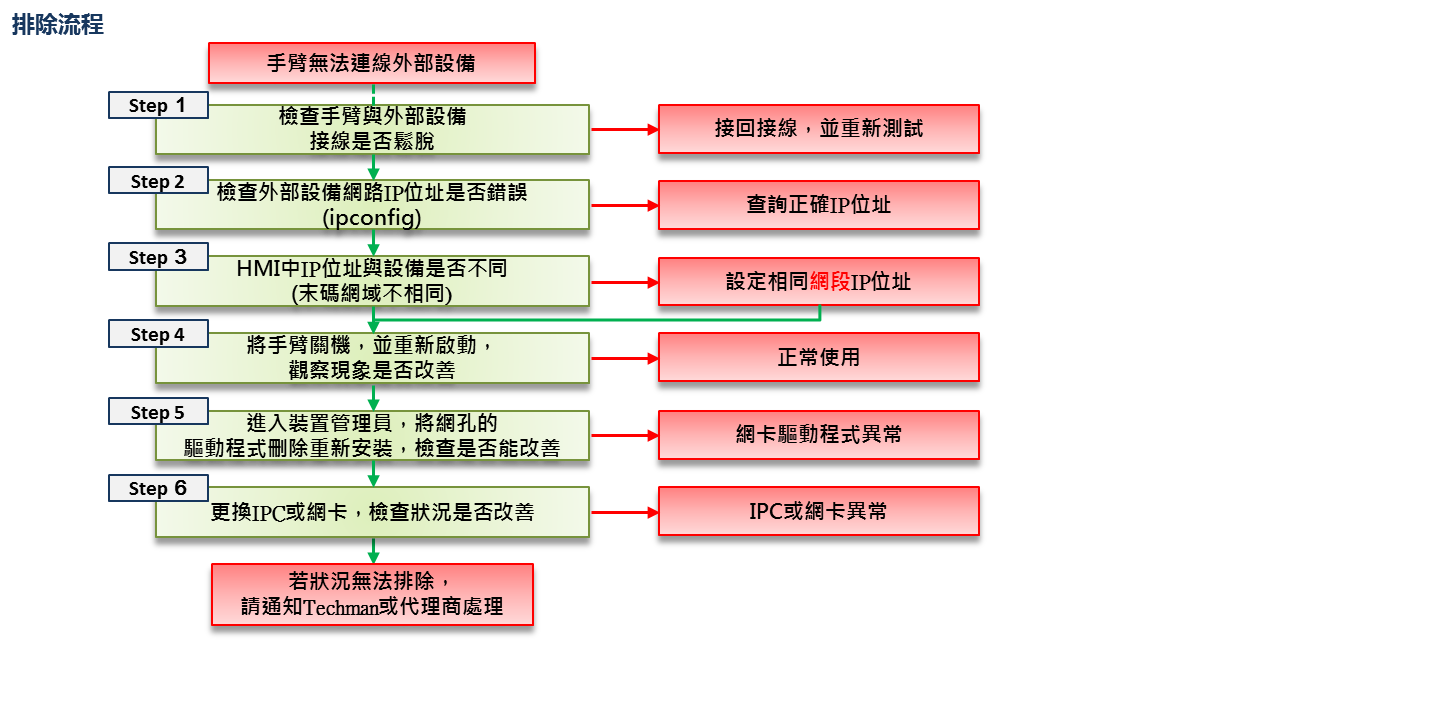
| 發生結果: | 手臂連接外掛相機、PC、通訊連接設備無法使用,孔位燈號沒亮或只亮單色燈號(橘色或綠色)。外接設備需使用 USB 旁的網孔。 | |
| 可能原因: | 以下是電控箱無法與外部設備連線的可能症狀:
1)手臂與外部設備接線鬆脫 2)外部設備網路IP位址是否錯誤 3)HMI中IP位址與設備是否不同 4)網卡驅動程式異常 5)IPC或網卡異常` |
常見故障碼:
NA |
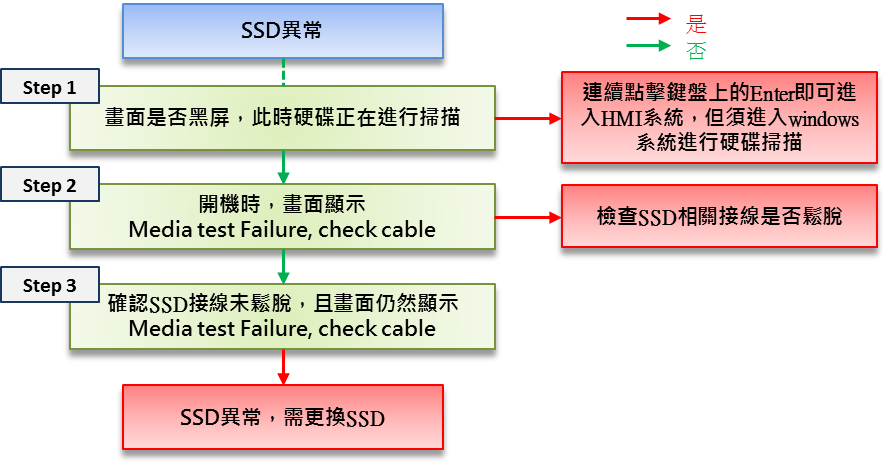
SSD異常 #
| 案件描述: | 本節介紹當SSD異常時,可能出現的故障以及每種故障的建議操作。 | |
| 發生結果: | 無法進入HMI系統,畫面顯示黑屏或Media test Failure, check cable。 | |
| 可能原因: | 以下是電控箱無法開機的可能症狀:
1)SSD相關接線鬆脫 2)硬碟掃描設定 3)SSD損毀 |
常見故障碼:
NA |
| 症狀現象圖: | 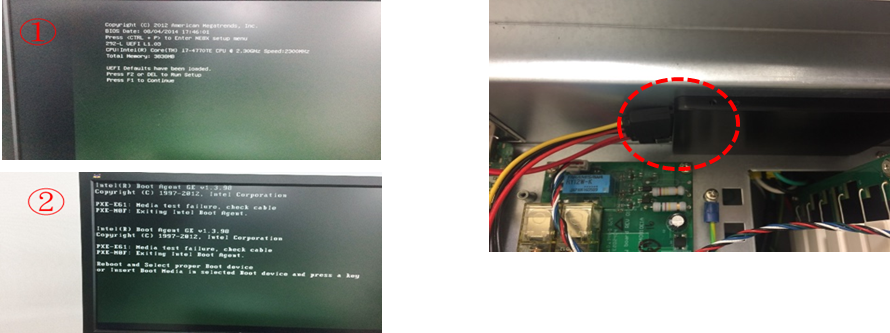 |
|
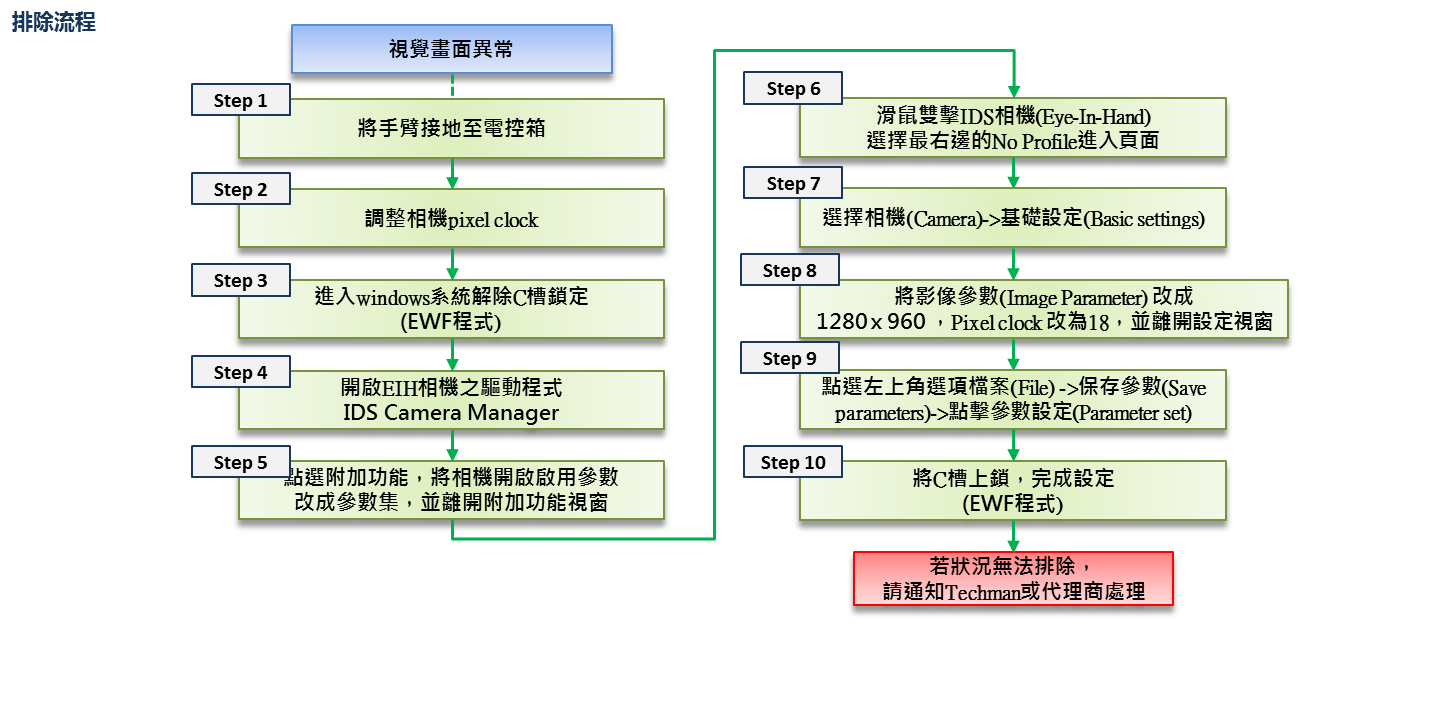
視覺畫面異常 #
| 案件描述: | 本節介紹當視覺畫面異常時,可能出現的故障以及每種故障的建議操作。 | |
| 發生結果: | 使用視覺任務時,畫面中有4分之1範圍不會更新畫面。 | |
| 可能原因: | 以下是電控箱無法開機的可能症狀:
1)相機USB接線影響 2)相機影像參數影響 3)Pixel clock 過高 |
常見故障碼:
NA |
| 症狀現象圖: | 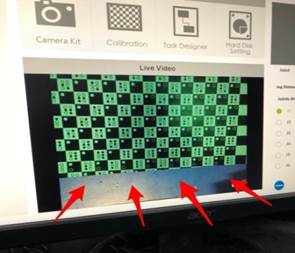 |
|
手臂奇異點 #
| 案件描述: | 本節介紹手臂奇異點空間以及防範方式。 | |
| 發生結果: | 當手臂行徑奇異點時,系統會爆發0X09,0x14代碼錯誤或手臂點位資訊錯亂,造成手臂行走路線異常。 | |
| 可能原因: |
1. 點位設定在內部奇異空間。
第五、六軸之軸中心交點,至第一軸中心之延伸線的距離,此以距離為半徑之圓柱體內,均為內部奇異空間(如上圖綠線處)。一旦機械手臂接近內部奇異點,手臂將停機並報出警告。 2. 點位超出延伸性奇異空間。 手臂伸至最長時,即為最大工作半徑,超出此半徑外之區域為延伸性奇異空間。一旦機械手臂超出外部奇異點,手臂將停機並報出警告,意即末端可能超出手臂運動範圍而停止運行。 當手臂因內部奇異點空間而報出警告時,按下FREE 按鈕即可解除。請重新設定點位位置或改變點位間運動方式,避免點位間的手臂路徑穿越內部奇異空間,如下圖。 3. 點位設定進入腕部奇異空間。 當第四、六軸為平行時會進入奇異空間,此時手臂的運動會造成第四軸大角度的位移,手臂會因為安全性與避免運動速度過快而停止。一旦機械手臂進入腕部奇異空間,手臂將停機並報出錯誤。 處理步驟: 當手臂因腕部奇異點而報出警告時,按下FREE 按鈕即可解除。當第四、六軸平行時卻又嘗試指定工具坐標系Z 軸運動時即會遭遇腕部奇異空間,此時可參考下圖的方式改變姿態以避免四、六軸平行。
|
常見故障碼:
0x00000009 0x00000014 0x0000FF05 |

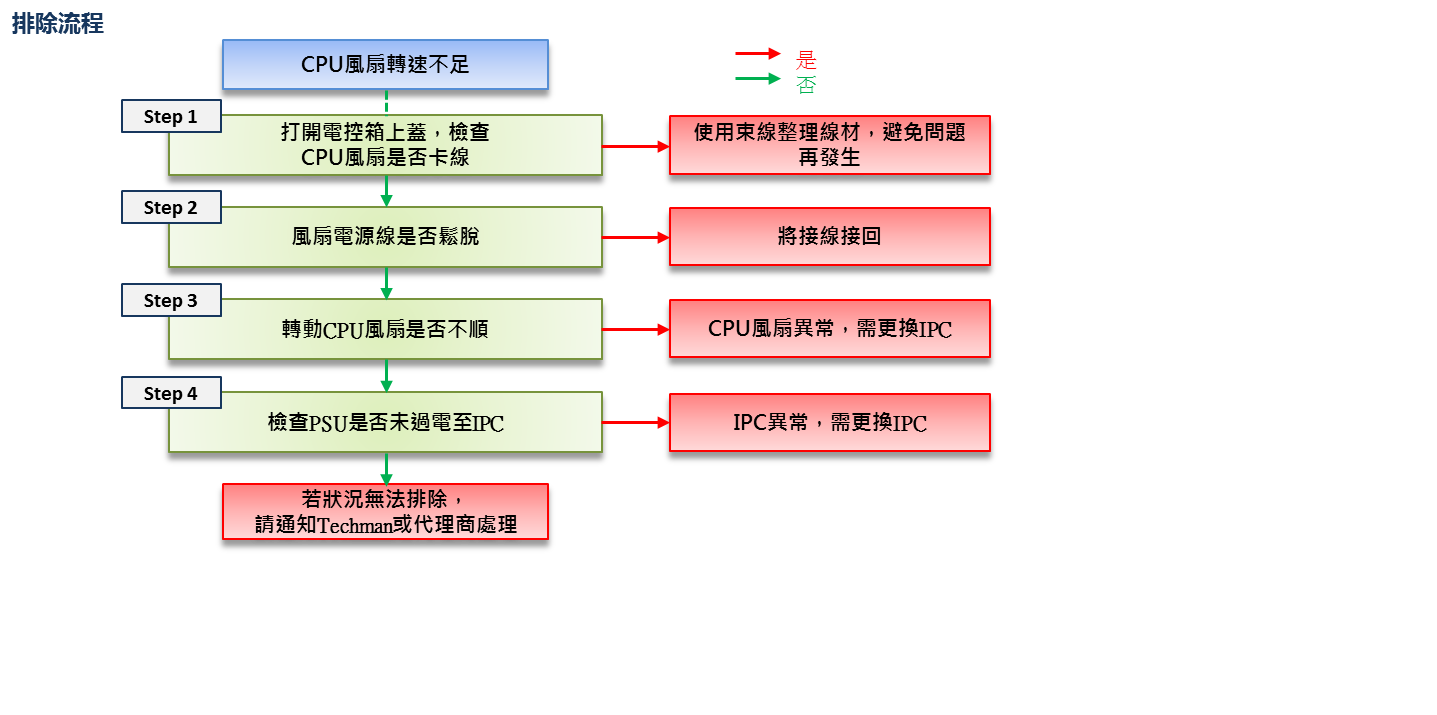
CPU風扇轉速不足 #
| 案件描述: | 本節介紹當CPU風扇轉速不足時,可能出現的故障以及每種故障的建議操作。 | |
| 發生結果: | 當HMI顯示0x00040015: 風扇低於1000轉,導致手臂無法操作。 | |
| 可能原因: | 以下是電控箱無法開機的可能症狀:
1)CPU風扇卡線 2)風扇電源線鬆脫 3)CPU風扇轉動不順 4)PSU未過電至IPC 5)軟體問題 |
常見故障碼:
0x00040015 |
| 症狀現象圖: |  |
|
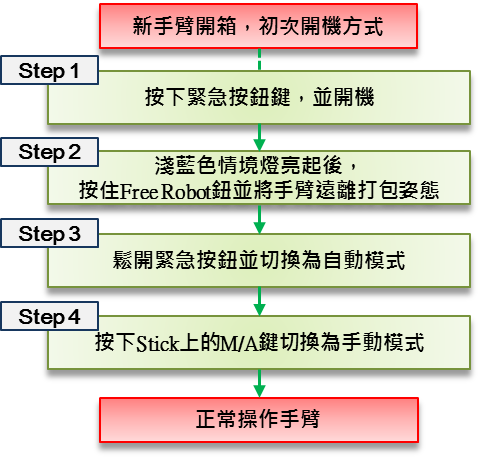
新手臂開箱,初次開機方式 #
| 案件描述: | 本節介紹當新手臂開箱,初次開機方式時的建議操作。 |
| 發生結果: | 若沒有按照流程操作,手臂解剎車時,可能會導致Joint撞擊而報錯。 |
| 操作流程:
|
|
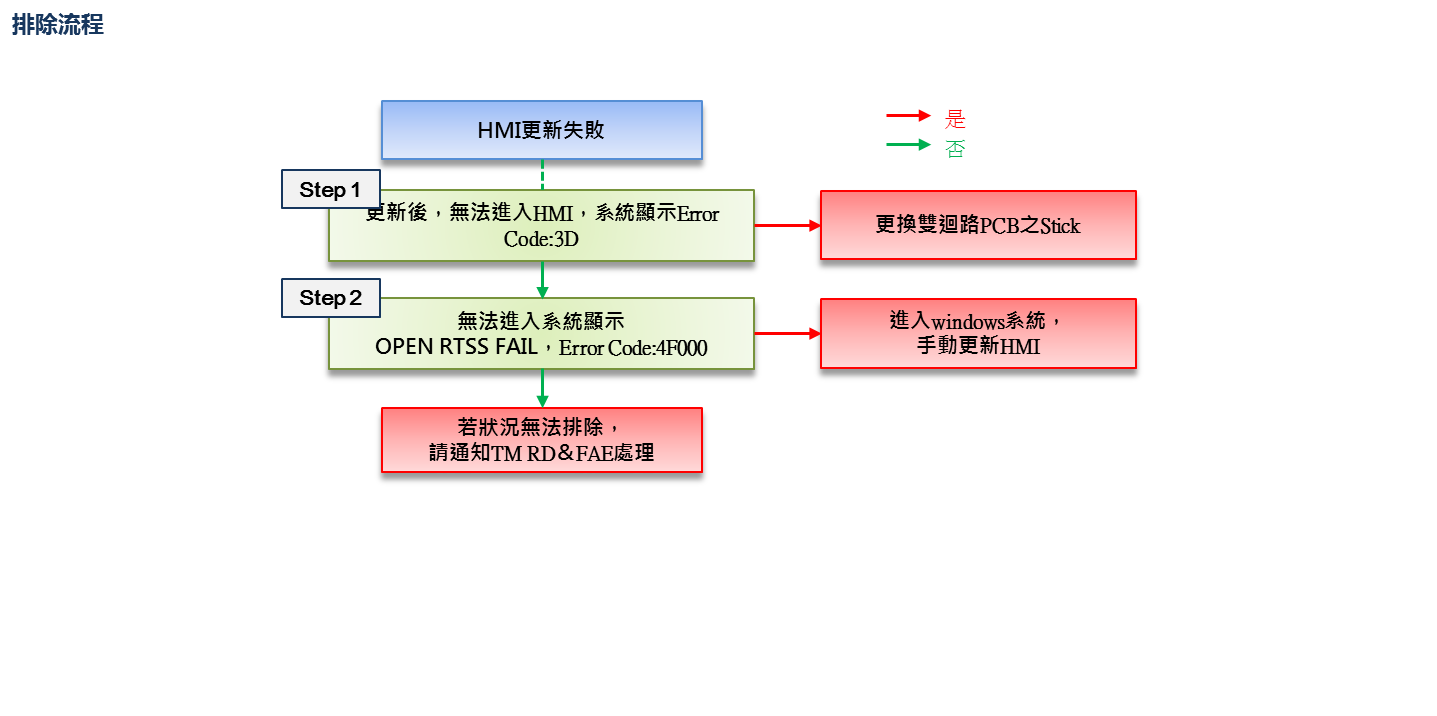
HMI更新失敗 #
| 案件描述: | 本節介紹HMI更新失敗時,可能出現的故障以及每種故障的建議操作。 | |
| 發生結果: | 1.更新至1.64之後版本,系統顯示Error Code:3D
2.更新HMI失敗,系統顯示OPEN RTSS FAIL,Error Code:4F000 |
|
| 可能原因: | 以下是HMI更新失敗的可能症狀:
1)使用單迴路PCB的Stick,更新HMI版本後,系統偵測錯誤 2)版本差異太大,造成Fw與Esi更新Timeout |
常見故障碼:
0x0000003D 0x0000004F 0x0004F000 0x00045101 |
| 症狀現象圖: | 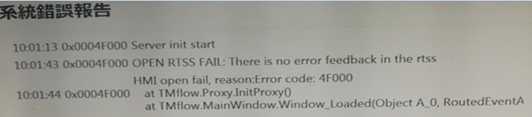 |
|
專案開啟失敗 #
| 案件描述: | 本節介紹當專案開啟失敗時,可能出現的故障以及每種故障的建議操作。 | |
| 發生結果: | 進入HMI系統欲開啟專案時,系統顯示Load project file error | |
| 可能原因: | 以下是專案開啟失敗的可能症狀:
1)專案存檔後直接關機,造成專案內部未存檔完成,造成損毀 2)不正常關機 3)匯出專案時,未等待匯出完成便拔除USB設備,造成匯出的專案檔毀損 |
常見故障碼 :
NA |
| 症狀現象圖: | 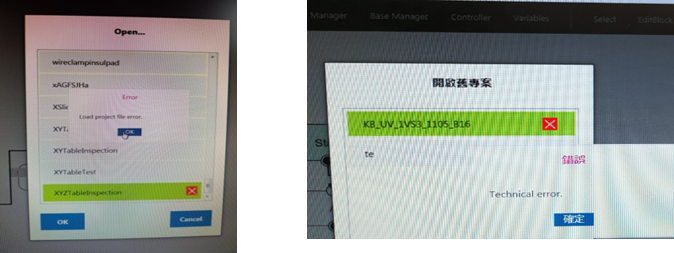 |
|
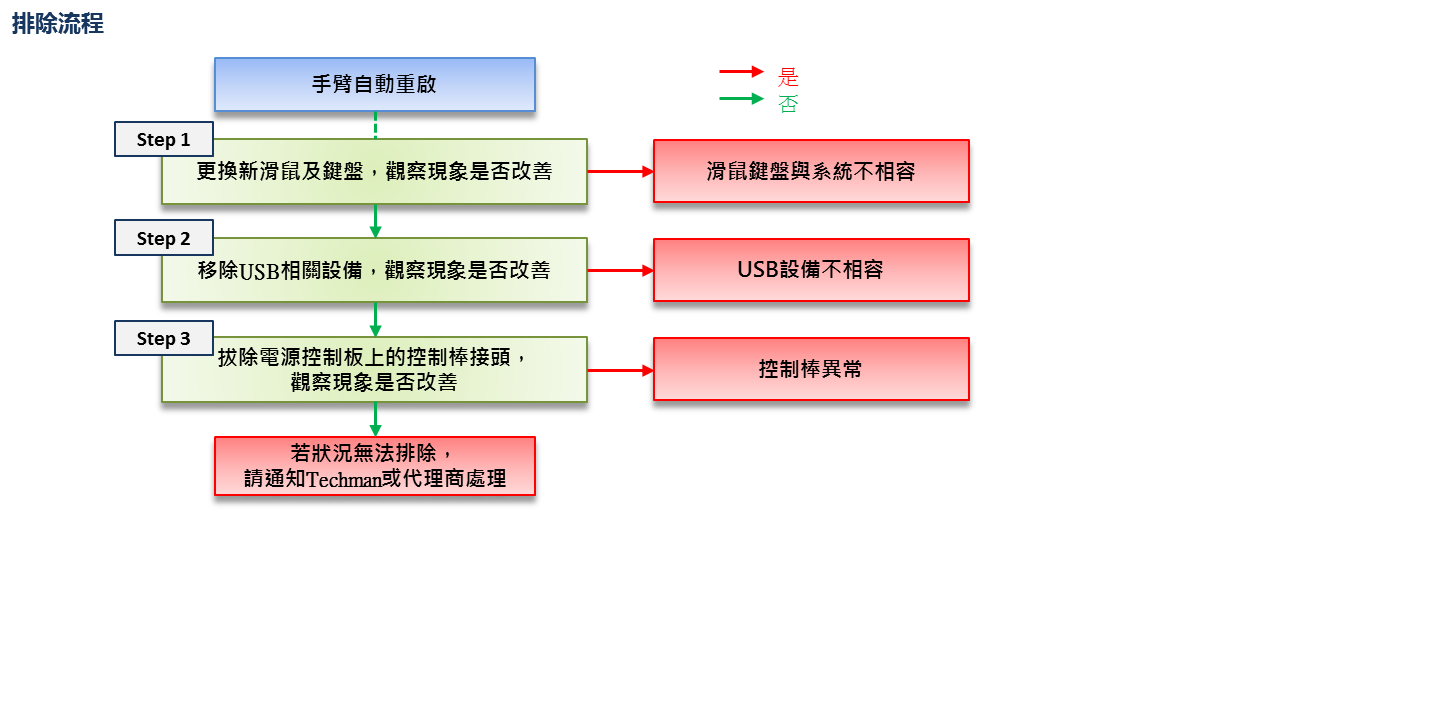
手臂自動重啟 #
| 案件描述: | 本節介紹當手臂自動重啟時,可能出現的故障以及每種故障的建議操作。 | |
| 發生結果: | 當手臂關機時,電控箱會自動啟動,無法正常關機。 | |
| 可能原因: | 以下是電控箱無法開機的可能症狀:
1)鍵盤與滑鼠不相容 2)USB相關設備異常 3)控制棒開關按鍵異常 |
常見故障碼:
NA |
| 症狀現象圖: |  |
|
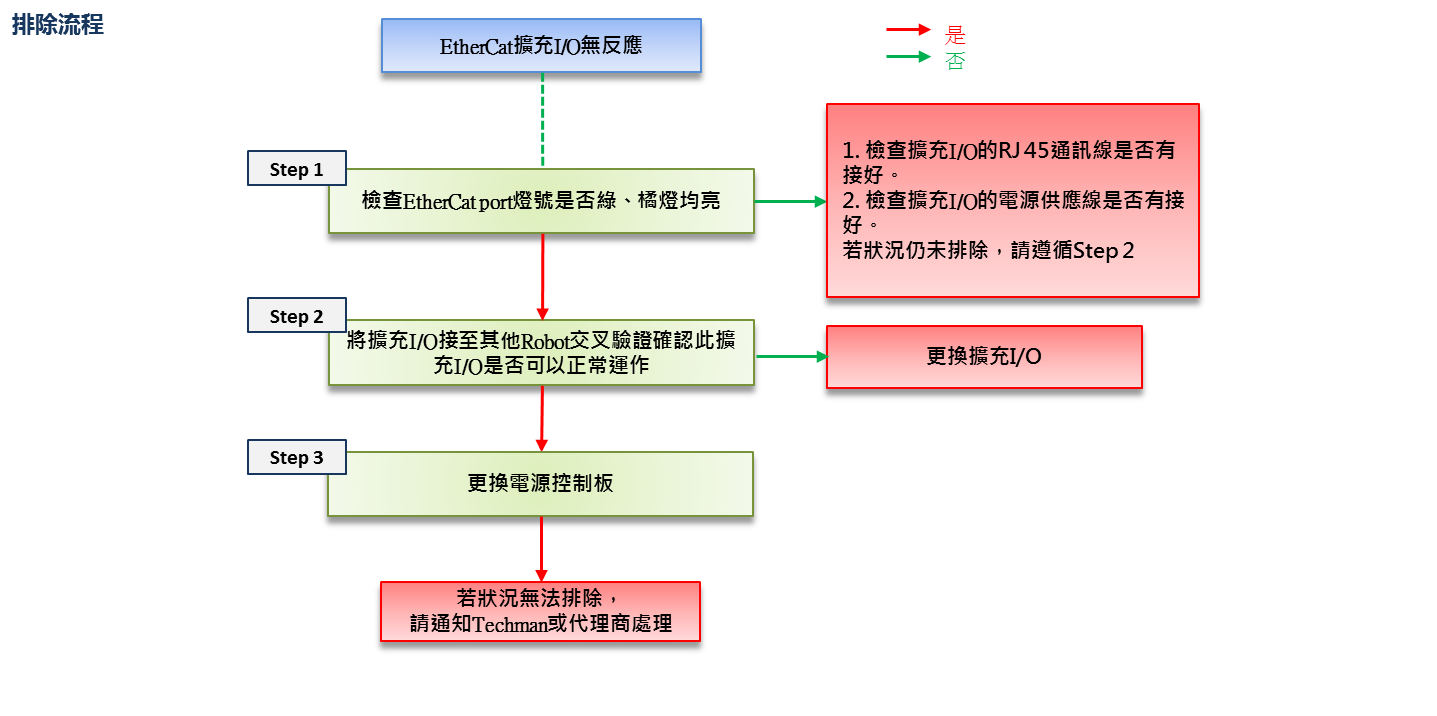
Ether Cat擴充I/O無反應 #
| 案件描述: | 本節介紹當Ether Cat擴充I/O無反應時,可能出現的故障以及每種故障的建議操作。 | |
| 發生結果: | 使用EtherCat擴充IO時,外接設備無反應,HMI系統警報0x50。 | |
| 可能原因: | 1)Power control board上的Ether Cat的接孔損毀
2)外接設備異常 3)外接設備連接線異常 |
常見故障碼 :
NA |
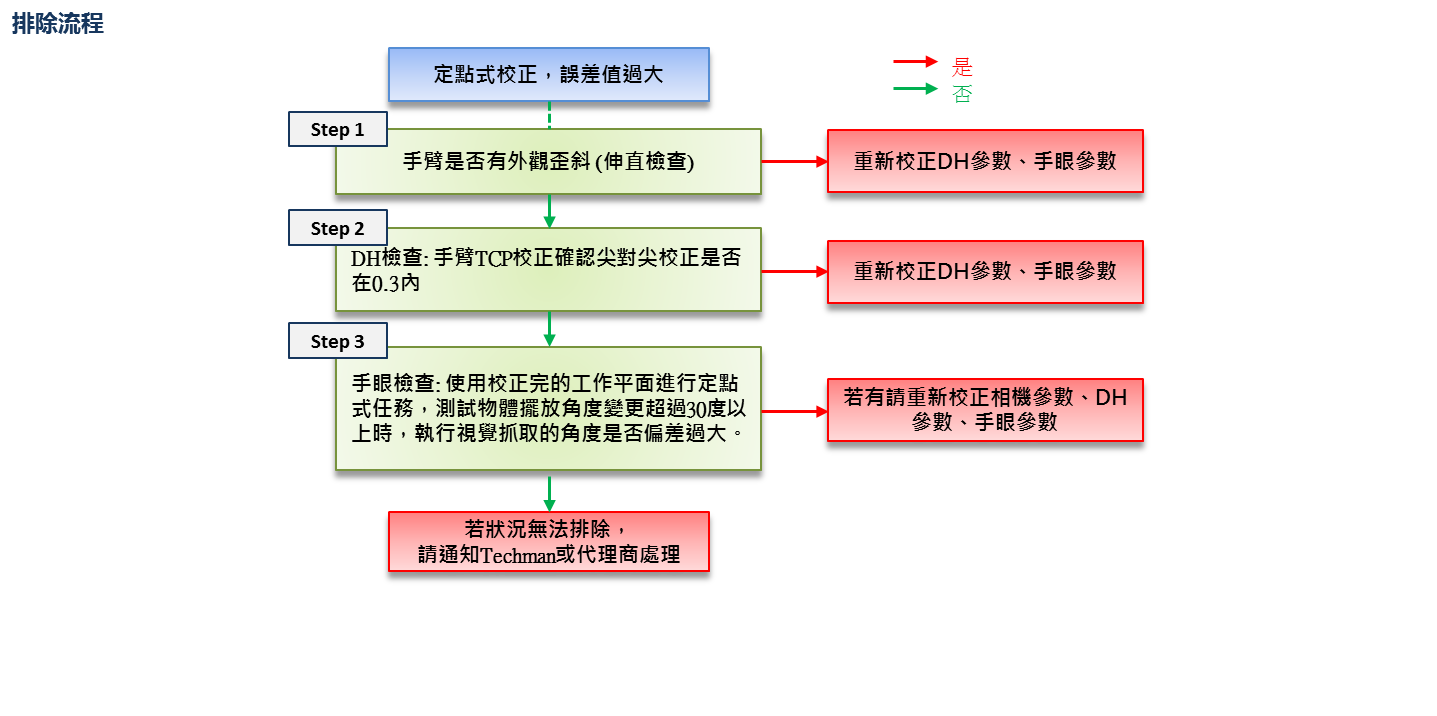
定點式校正,誤差值過大 #
| 案件描述: | 本節介紹當定點式校正,誤差值過大時,可能出現的故障以及每種故障的建議操作。 | |
| 發生結果: | 使用定點式進行校正時,校正誤差量過大。 | |
| 可能原因: | 1)Joint偏移
2)手臂歪斜 3)動力學校正誤差量過大 |
常見故障碼 :
NA |
| 症狀現象圖: | 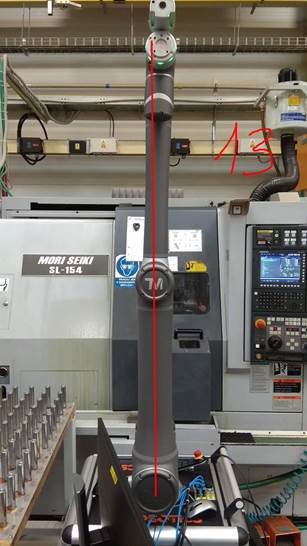 |
|