In TMflow, the controller can control the robot’s motion (both cartesian space and joint space), control box I/O, free button setting.
- Joint Space Control: Users can jog the robot’s 6 joints by using ‘Direct Move’
 or ‘Incremental Jog’
or ‘Incremental Jog’ 

- Direct Move will directly move to the target degree entered in the textbox, the speed can be adjusted.
- Incremental Jog can modify Jog Distance and Speed.
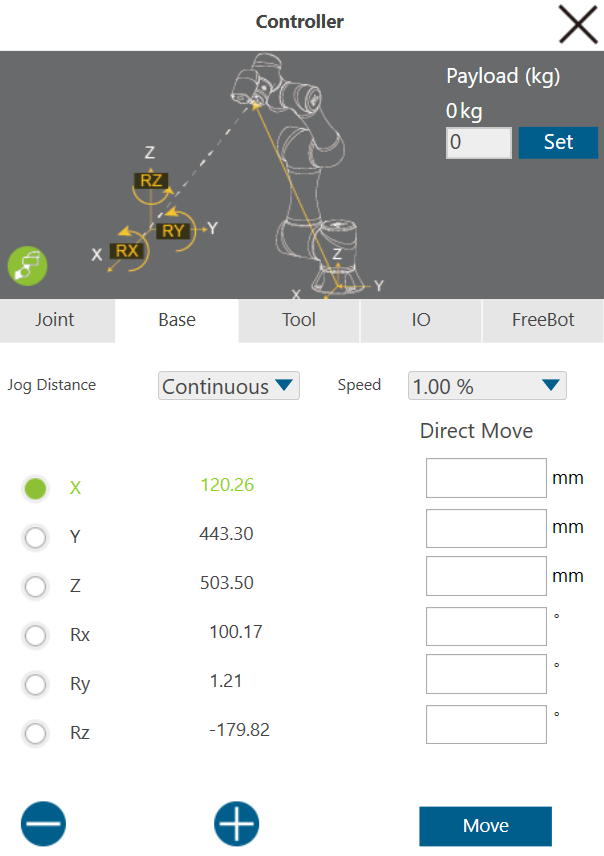
- Base (Cartesian Space) Control: Users can move the robot by assigning a target position in cartesian space (with respect to Robotbase, vision base, custom base)
-
IMPORTANT: The Base tab is used to move to a specified target with respect to the specified Base.Two modes are the same with joint space control.
-
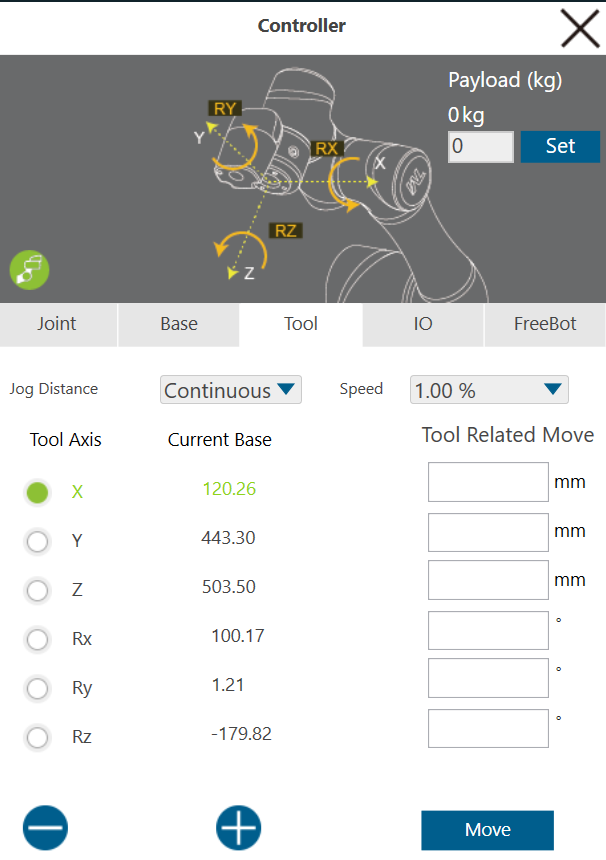
- Tool: Move according to the Tool Coordinate.
 I/O: Click the I/O tab to open the I/O control page. In the IO control, the output value of each I/O can be controlled independently, including Control Box I/O, End Module I/O, Camera Module I/O, and Safety Connector I/O.
I/O: Click the I/O tab to open the I/O control page. In the IO control, the output value of each I/O can be controlled independently, including Control Box I/O, End Module I/O, Camera Module I/O, and Safety Connector I/O.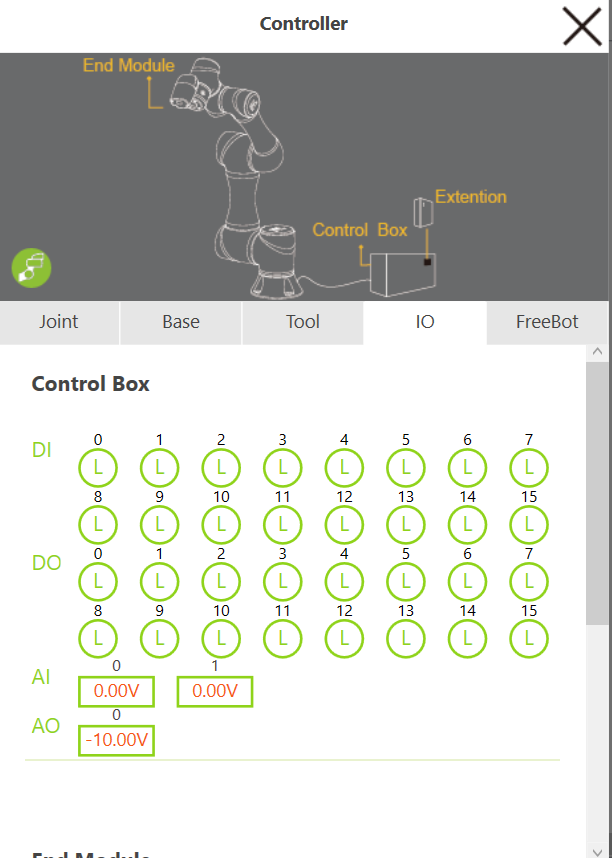 NOTE:
NOTE:
- Safety Connector IO is for HW 3.2 or newer exclusive.
- Safety Connector IO is read-only and users cannot change the state in TMflow.
- FreeBot


