TMflow Software version: 2.16 or above versions
TM Robot Hardware version: HW3.2 or above versions
Specific requirements:
- External and lens
- Support Camera: Basler, FLIR, TM Camera
- Calibration project: Refer to Calibration Using TMflow Project – Tutorial
- Intrinsic parameter Knowledge: Refer to Notice on External Camera Calibration
Note: Older or newer software versions may have different results.
Purpose #
In the following situation , there may be a need to use Customize EIH Camera:
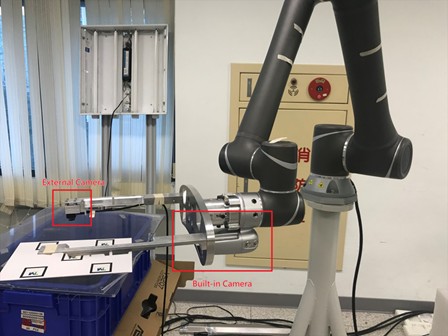
- When TCP covers the built-in camera, it becomes necessary to extend an external camera for capturing. As shown below
- Place the camera in a position that is easier to capture to reduct CT.
- In order to achieve higher accuracy, it is usually desired to have better resolution at a higher position to improve positioning accuracy.
External Camera Setup #
Install the external camera at the desired working location, connect the camera to the control box, and it is recommended to use a casing to cover the wiring.

Camera Connection #
Enter Configuration->Vision settings->Camera Kit, and check whether the external camera is found.

Intrinsic Parameter Calibration #
Please refer to Notice on External Camera Calibration for Intrinsic Parameter Calibration. In the section 2, decide the working distance and choose a suitable camera and lens. Proceed with Intrinsic Parameter Calibration in section 3 to 4.
Hand-Eye Calibration #
Please refer to the Calibration Using TMflow Project – Tutorial for hand-eye calibration. Sections 6 to 7 of the article explain how to download and import the project, while section 9-2 provides instructions on setting up and running a customize EIH calibration project.


