Examples are valid for:
TMflow Software version: 2.16
TM Robot Hardware version: Only provide HW3.2 or above
Prerequisites
- Programming with ROS, especially with ROS 2 Foxy version
- Installing and basic usage of TM ROS Driver
- Familiar of using TMflow 2.16, especially with TMvision
Note that older or newer software versions may have different results.
TM ROS Driver can receive the source image from the vision job (with External Detection) and publish it as a ROS topic. Users may go through the following steps to do so.
Clone and build the TM ROS Driver Repository to the corresponding workplace.
 Run the TM Vision ROS Driver,
Run the TM Vision ROS Driver,

Then, on the robot, create and edit a Vision Node on a flow project.

Select AOI-only as the vision job type. Set up the proper initial position and camera parameters.

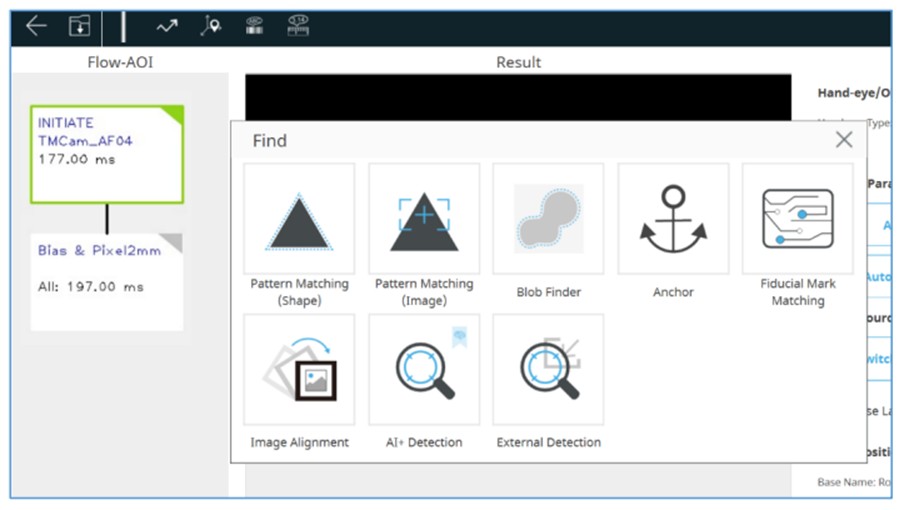
Then, select Find > External Detection, which adds an External Detection Node to the vision job flow.
Now, set up External Detection. To test the connection with TM ROS Driver, enter http://<ip address>:6189/api on Get and click Send. Note that, <ip address> represents the IP address of the computer where the TM Vision ROS driver is running. If it is good, the textbox will receive a message presented in JSON format. Then, set the URL of Inference POST to http://<ip address>:6189/api /DET and the rest of the parameters. For more about External Detection, refer to Software Manual: TMvision.

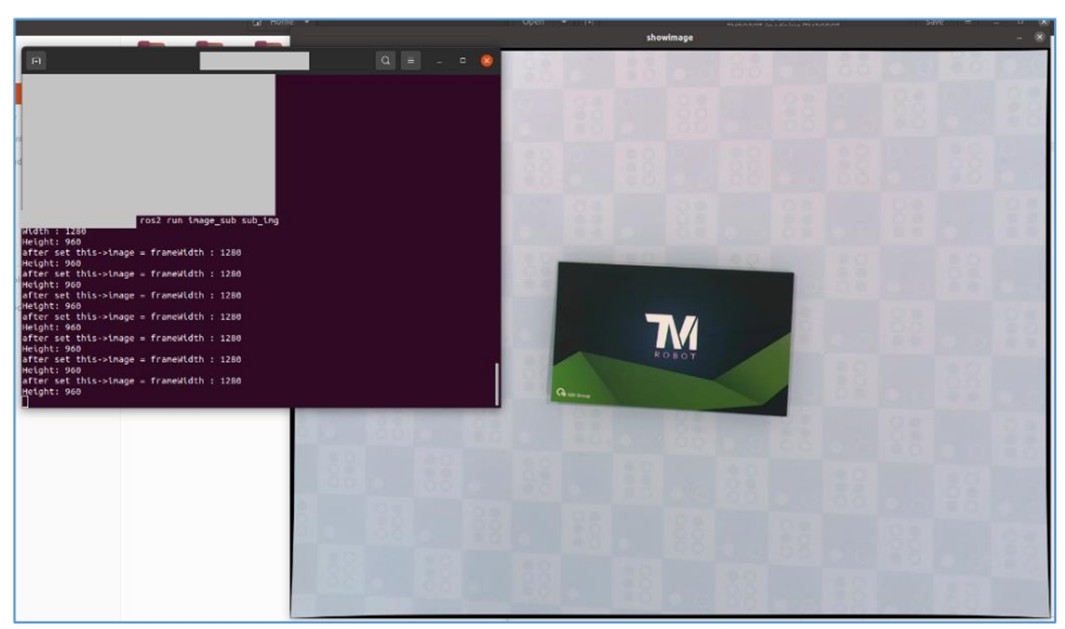
The image topic techman_image will start publishing once the flow project is running. On the other hand, users can use their own ROS Node to subscribe to the image topic. Or, run the sample program on the repository.