TMflow Software version: All versions.
TM Robot Hardware version: All versions.
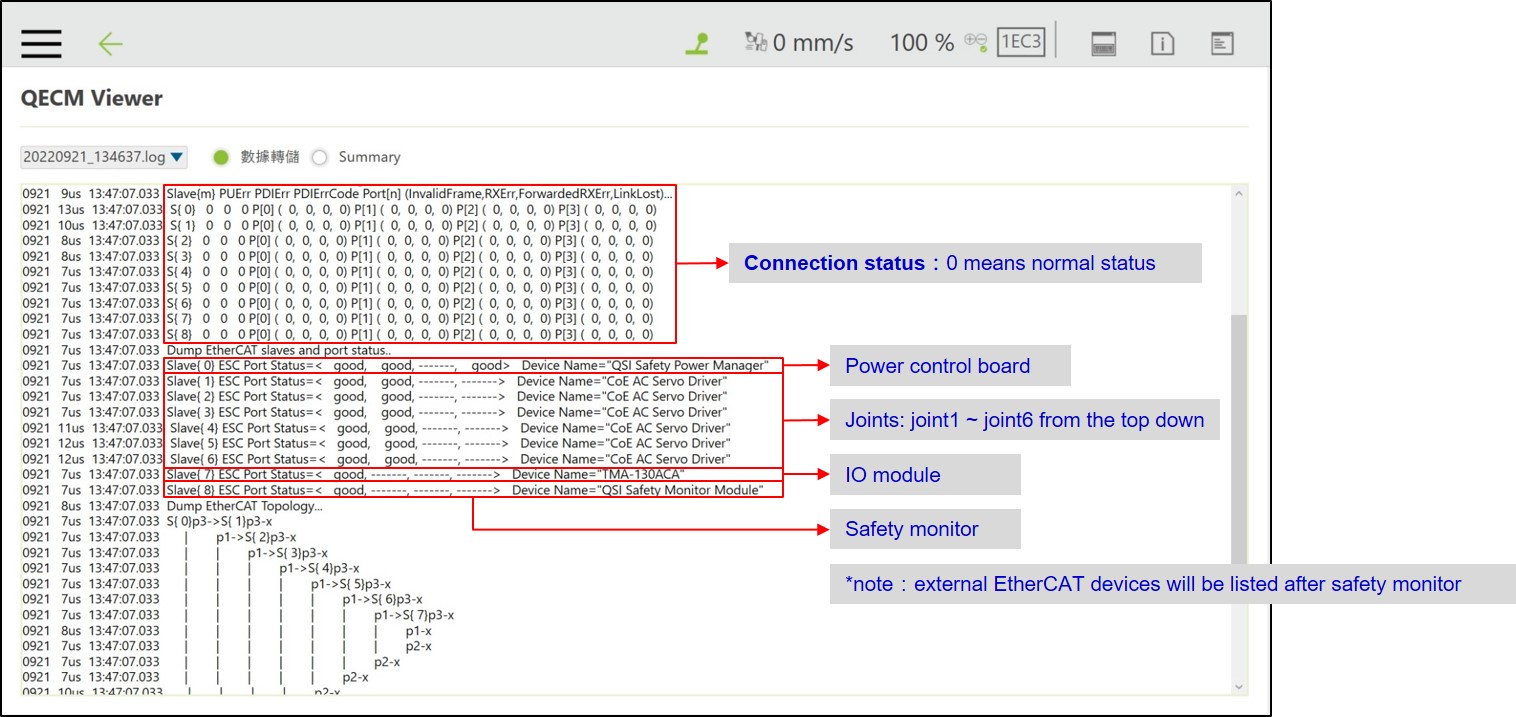
When EtherCAT related problems occurred during operating or booting up, user can check the EtherCAT connection status from QECM view, following is an example of a typical HW3.2 robot:
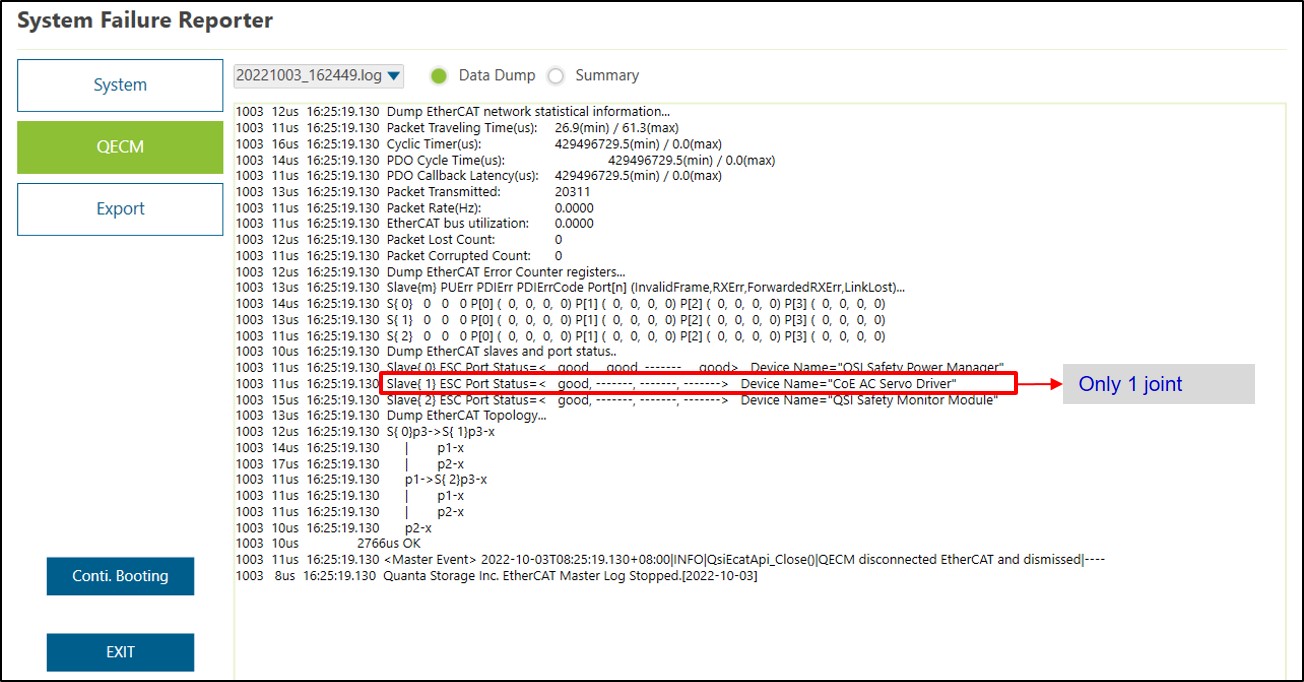
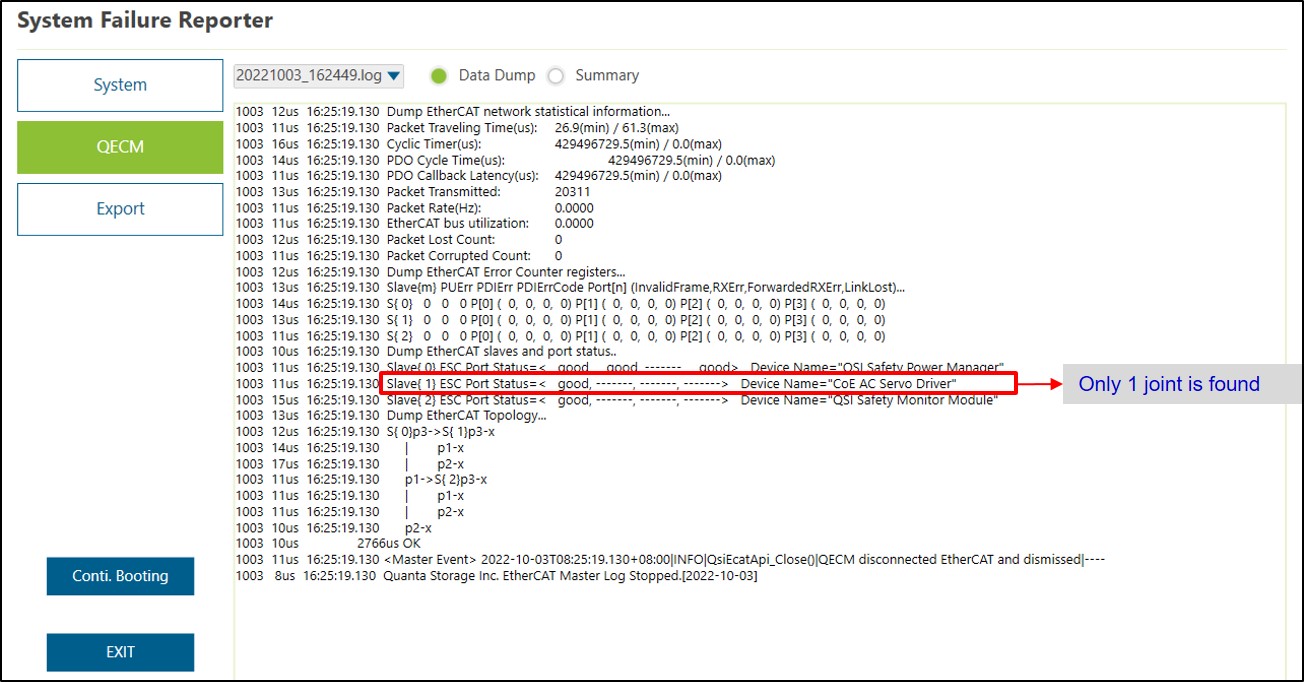
Example: The following is an example of EtherCAT abnormality when booting up. Comparing to normal status, the system only detect one joint, which means the system only detect J1, and the connection between J1 and J2 is probably abnormal and the possible defective parts include J1, J2 and the cables between them.
Example:Connecting J1 and J4 with an additional signal cable, and the result is expected to have 6 slaves including power control board, J1, J4, J5, J6, IO module and safety monitor. Before performing test, check whether the LED of IO module will flash or not.
Note1: Once the light did not flash, the power cable need to be tested because there is no power to IO module.
Note2: Refer to FAQs chapter 5.2 to know the way to rotate the joint when robot is powered off.

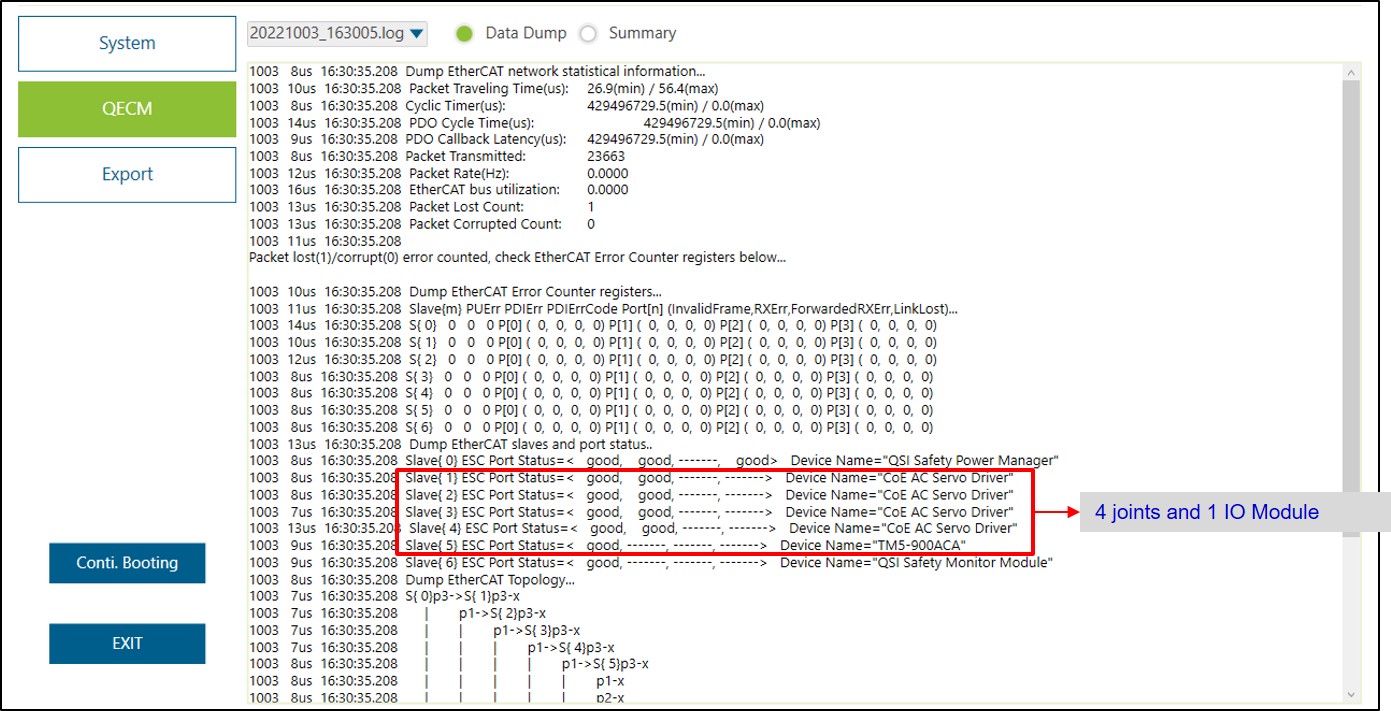
Example: After connecting J1 and J4, reboot the control box and check the slaves. From following example, there are 4 joint and 1 IO module(including J1, J4 ,J5 and J6), the result indicates the J2 is abnormal.
Example: In case there is no other joint after connecting J1 and J2, the result means the possible defective parts are J1 or signal cable. User may use another signal cable or connect J2 with the base to find out the defective part.